opticalFlowLKDoG
目的利用高斯法的Lucas-Kanade导数估计光流
描述
创建一个光流对象来估计移动对象的方向和速度,使用Lucas-Kanade导数高斯(DoG)方法。使用对象函数<一个href="//www.tianjin-qmedu.com/help/vision/ref/opticalflowhs.estimateflow.html">estimateFlow估计光流矢量。使用<一个href="//www.tianjin-qmedu.com/help/vision/ref/opticalflowhs.reset.html">重启对象函数,可以重置光流量对象的内部状态。
创建
描述
opticFlow= LOTELDFLOWLKDOG.
opticFlow= opticalFlowLKDoG (名称,值)名称,值对参数。任何未指定的属性都有默认值。用引号括起每个属性名。
例如,LoctalFlowlkdog('numframes',3)
属性
对象的功能
estimateFlow |
估计光学流量 |
重启 |
重置光学流量估计对象的内部状态 |
例子
使用Lucas-Kanade Dog方法计算光学流量
读取视频文件。指定要读取帧的时间戳。
Vidreader = Videoreader('VisionTraffic.avi',“CurrentTime”11);
使用Lucas-Kanade DoG方法创建一个光流对象来估计光流。指定降噪阈值。输出为指定光流估计方法及其属性的光流对象。
opticFlow = opticalFlowLKDoG ('noisethreshold', 0.0005)
OpticFlow = LocoundFlowlkdog具有属性:NUMFRAMES:3 ImageFiltersigma:1.5000梯度Filtersigma:1 Noisethreshold:5.0000E-04
创建一个自定义图形窗口来可视化光流向量。
h =图;Movegui(h);hvieppanel = Uipanel(H,'位置',[0 0 1 1],'标题','光学流量矢量图');hPlot =轴(hViewPanel);
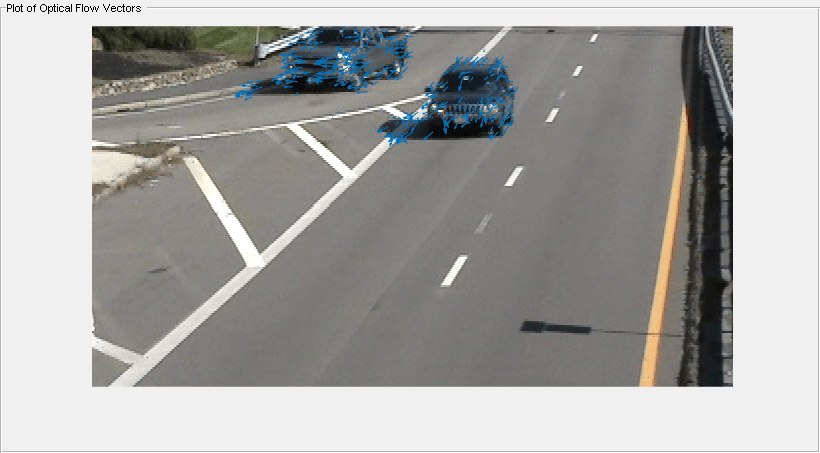
读取图像帧并转换为灰度图像。估计连续图像帧的光流。显示当前图像帧并绘制光流矢量为颤振图。
而hasFrame(视频阅读器)frameRGB = readFrame(视频阅读器);frameGray = rgb2gray (frameRGB);流= estimateFlow (opticFlow frameGray);imshow (frameRGB)上绘图(流量,“DecimationFactor”, 5 [5],“ScaleFactor”, 35岁,'父母',hplot);保持关闭暂停(10 ^ 3)结束
算法
参考资料
[1] Barron,J.L.,D. J.Leet,S.S.Beauchemin和T.Burkitt。“光学流动技术的性能。”在计算机愿景和模式识别(CVPR)的IEEE会议的诉讼程序,236 - 242。香槟,IL: CVPR, 1992。
扩展功能
您还可以从以下列表中选择一个网站:
