主要内容
PCBIN.
空间箱点云点
句法
描述
垃圾箱= pcbin (Ptcloud.那麻木那spatialLimits)
[也退货垃圾箱那binLocations) = pcbin (___)binLocations,每个垃圾箱的空间范围垃圾箱.binLocations大小是一样的吗垃圾箱.
[___) = pcbin (___,'binoutput',true)还指定的格式垃圾箱和binLocations输出。
当你设置'BinOutput' 到真正的那垃圾箱和binLocations作为大小的单元格阵列返回[numbinsx.那numbinsy.那numbinsz.]。
当你设置'BinOutput' 到错误的和Ptcloud.是无组织的点云,垃圾箱被归还为一个m1数字向量。binLocations被归还为一个m6矩阵。
当你设置'BinOutput' 到错误的和Ptcloud.是有组织的点云,垃圾箱被归还了m——- - - - - -N矩阵。binLocations被归还为一个m——- - - - - -N6矩阵。
例子
从点云构建占用网格
将云数据读入工作区。
ptCloud = pcread ('茶壶.ply');
在点云到32×32×32个网格的空间箱。
索引= pcbin(ptcloud,[32 32 32]);
建立一个占据网格。
占用= Cellfun(@(c)〜isempty(c),索引);
显示占用网格。
ViewPnl = uipanel(图);volshow (occupancyGrid“父”,ViewPnl);

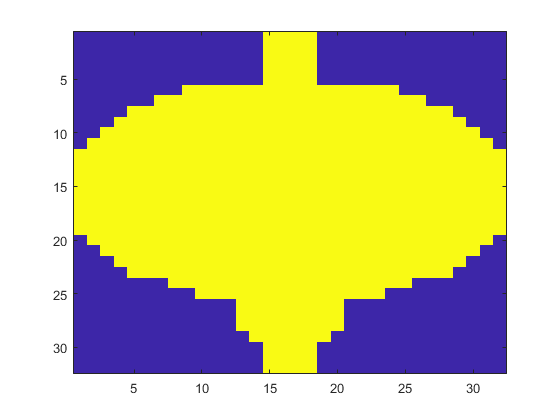
从点云构建鸟瞰浓度网格
将云数据读入工作区。
ptCloud = pcread ('茶壶.ply');
在点云到32×32×1电网的空间箱。
index = pcbin(ptCloud,[32 32 1]);
构建密度网格。
denysgrid = cellfun(@(c)〜isempty(c),索引);
显示密度网格。
数字;ImageC(DENESGRID);
输入参数
输出参数
扩展能力
在R2020A中介绍
你也可以从以下列表中选择一个网站:
