主要内容
pctransform.
转换3-D点云
描述
ptCloudOut= pctransform (ptCloudIn,tform.)tform.对于点云,ptCloudIn。变换可以是刚性变换也可以是非刚性变换。
ptCloudOut= pctransform (ptCloudIn,D)D指向点云。点云转换使用位移字段定义相对于点云中的每个点的平移。
例子
使用刚性变换旋转三维点云
读点云。
ptcloud =缺陷(“teapot.ply”);
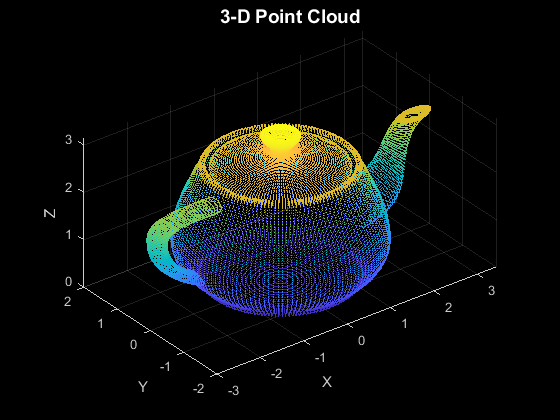
绘制点云。
图pcshow (ptCloud)包含(“X”)ylabel(“Y”) zlabel ('z')
![]()
使用沿z轴旋转45度旋转的变换对象。
θ=π/ 4;rot = [cos(theta) sin(theta) 0;…-sin(θ)cos(θ)0;…0 0 1);trans = [0, 0, 0];tform = rigid3d(腐烂,反式);
变换点云。
ptCloudOut = pctransform (ptCloud tform);
绘制转换后的点云。
图pcshow(ptcloudout)xlabel(“X”)ylabel(“Y”) zlabel ('z')
![]()
三维点云的仿射变换
此示例显示了3-D点云的仿射变换。指定的前向变换可以是刚性或非侵略性的变换。所示的变换包括输入点云的旋转(刚性变换)和剪切(非rigid变换)。
读取一个点云进入工作区。
ptcloud =缺陷(“teapot.ply”);
旋转三维点云
创建一个仿射变换对象,用于沿着沿着45度旋转的仿射变换对象z设在。
A = [cos(/4) sin(/4) 0 0;…-sin(/4) cos(/4) 0 0;…0 0 1 0;…0 0 0 1];tform = actifine3d(a);
变换点云。
ptcloudout1 = pctransform(ptcloud,tform);
三维点云的剪切
创建一个仿射变换对象,它定义沿着x设在。
A = [1 0 0 0;…0.75 1 0 0;…0.75 0 1 0;…0 0 0 1];tform = actifine3d(a);
变换点云。
ptCloudOut2 = pctransform (ptCloud tform);
显示原始和仿射转换的三维点云
绘制原始的三维点云。
图1 =图(“WindowState”,“正常”);axes1 =轴('父母',图1);pcshow(ptcloud,'父母', axes1);包含(“X”);ylabel (“Y”);zlabel ('z');标题(三维点云的,“字形大小”14)
绘制旋转和剪切仿射转换的三维点云。图2 =图(“WindowState”,“正常”);axes2 =轴('父母', figure2);pcshow (ptCloudOut1'父母', axes2);包含(“X”);ylabel (“Y”);zlabel ('z');标题({“三维点云的旋转”},“字形大小”14)
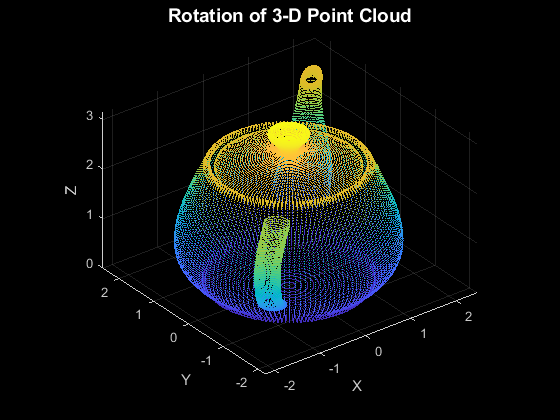
图3 =图(“WindowState”,“正常”);轴3 =轴('父母',图3);pcshow(ptcloudout2,'父母', axes3);包含(“X”);ylabel (“Y”);zlabel ('z');标题({'3-D点云的剪切'},“字形大小”14)

利用位移场进行点云变换
读取一个点云进入工作区。
ptcloud =缺陷(“teapot.ply”);
创建一个位移场D和点云一样大。
D = 0(大小(ptCloud.Location));
设置位移字段的值x- 对于7点的前半部分到7。
pthalf = ptCloud.Count / 2;D (1: pthalf, 1) = 7;
利用该区域提取兴趣区域(ROI)内的点数pointcloud.方法findNeighborsInRadius。设置位移字段值沿x- ,y- - - - - -,z-轴表示ROI内的点分别为4、4和-2。
索引= findNeighborsInRadius(ptCloud,[0 0 3.1],1.5);D(指标,1:2)= 4;D(下标3)= 2;
使用位移场变换点云。
ptCloudOut = pctransform (ptCloud D);
显示原始和转换后的点云。
图pcshow (ptCloud)包含(“X”);ylabel (“Y”);zlabel ('z');标题(“原始三维点云”)
![]()
图pcshow(ptcloudout)xlabel(“X”);ylabel (“Y”);zlabel ('z');标题(“使用位移场转换三维点云”)
![]()
输入参数
输出参数
扩展功能
另请参阅
对象
功能
pcalign.|pccat|pcdenoise|pcdownsample|pcfitplane|PCMerge.|pcplayer|pcread|pcregistericp|pcshow.|PCWRITE.
主题
在R2015A介绍
您还可以从以下列表中选择一个网站:
