主要内容
planeModel
对象,用于存储参数化平面模型
描述
基于描述平面的参数构建并存储参数平面模型。
属性
对象的功能
情节 |
在图形窗口中绘制平面 |
normalRotation |
计算变换以旋转正常到平面 |
例子
从点云检测多个平面
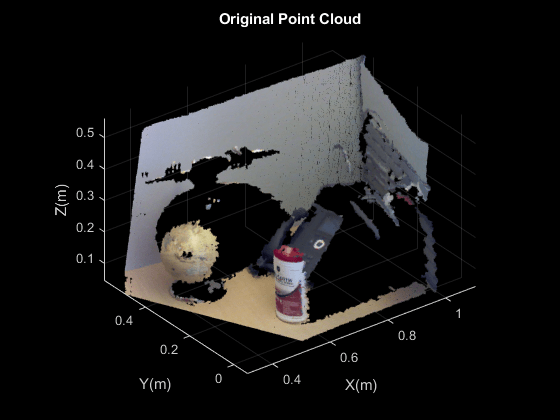
加载点云。
负载(“object3d.mat”)
显示并标记点云。
图pcshow (ptCloud)包含(“X (m)”)ylabel(“Y (m)”) zlabel (“Z (m)”)标题(原始点云的)
设置平面拟合的最大点到平面的距离(2cm)。
maxDistance = 0.02;
设平面的法向量。
referenceVector = [0, 0, 1];
将最大角度距离设置为5度。
maxAngularDistance = 5;
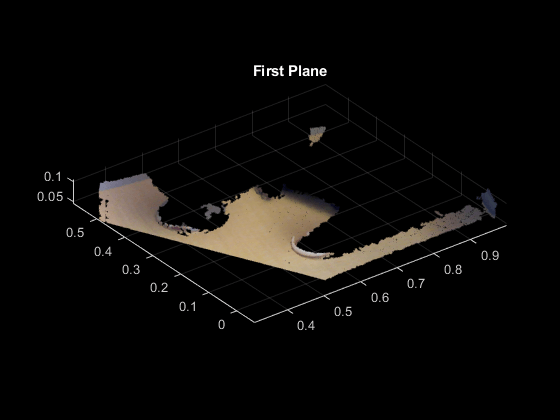
检测第一个平面,即表,并从点云中提取它。
[model1, inlierIndices outlierIndices] = pcfitplane (ptCloud,...Maxdistance,CaperencVector,Maxangulardistance);Plane1 = SELECT(PTCLOUD,INLIELINDICES);保留= SELECT(PTCLOUD,OutierIndices);
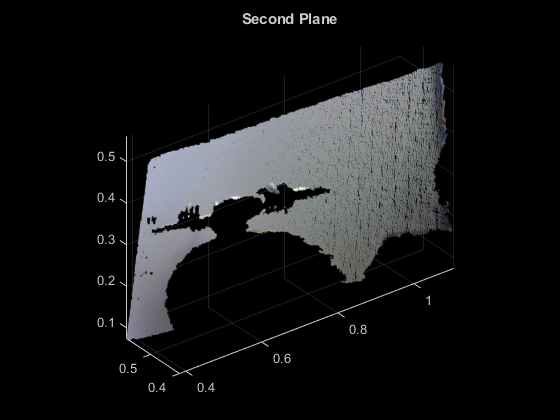
设置感兴趣的区域限制搜索第二个平面,左墙。
roi =[正无穷,0.4,正,负,正);sampleIndices = findPointsInROI (remainPtCloud roi);
检测左壁并从剩余的点云中提取。
[model2, inlierIndices outlierIndices] = pcfitplane (remainPtCloud,...Maxdistance,“SampleIndices”, sampleIndices);plane2 =选择(remainPtCloud inlierIndices);remainPtCloud =选择(remainPtCloud outlierIndices);
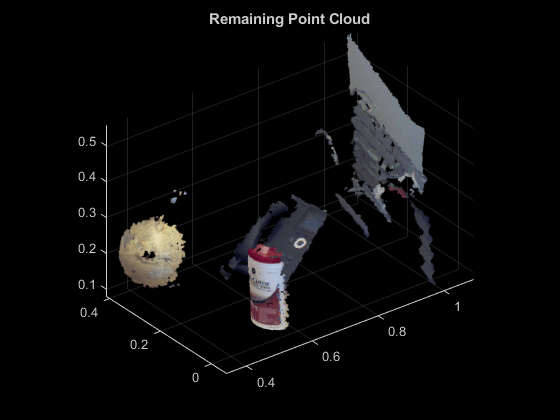
画出两个平面和其余的点。
图pcshow (plane1)标题('第一架飞机')
图pcshow (plane2)标题(第二架飞机的)
图pcshow (remainPtCloud)标题(“剩下的点云”)
另请参阅
pointCloud|pcfitplane|pcfitsphere|pcfitcylinder|sphereModel|Cylindermodel.|pcshow.|pcplayer|PCWRITE.|pcread|PCMerge.|pctransform.|pcdownsample|pcdenoise|affine3d|pcregistericp
主题
介绍在R2015B.
你也可以从以下列表中选择一个网站:
