主要内容
移动机器人算法设计
映射、路径规划、路径跟踪、状态估计
这些机器人系统工具箱™算法专注于移动机器人或地面车辆应用。这些算法可以帮助您完成从绘图到规划和控制的整个移动机器人工作流。您可以使用占用网格创建环境地图,为给定环境中的机器人开发路径规划算法,并调整控制器以遵循一组路径点。根据机器人的激光雷达传感器数据执行状态估计。
功能
块
主题
映射与路径规划
详细的入住率网格功能和地图结构。
PRM算法的工作原理和具体的调优参数。
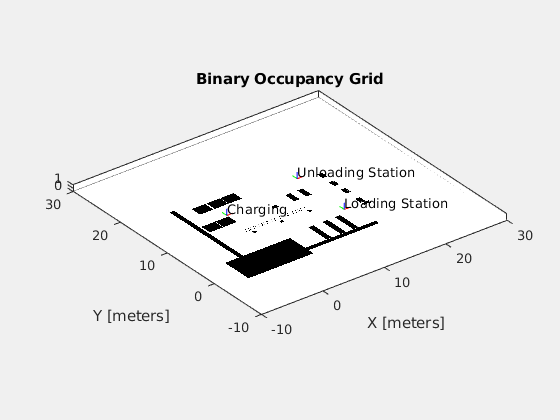
这个例子演示了如何使用概率路线图(PRM)路径规划器计算给定地图上两个位置之间的无障碍路径。
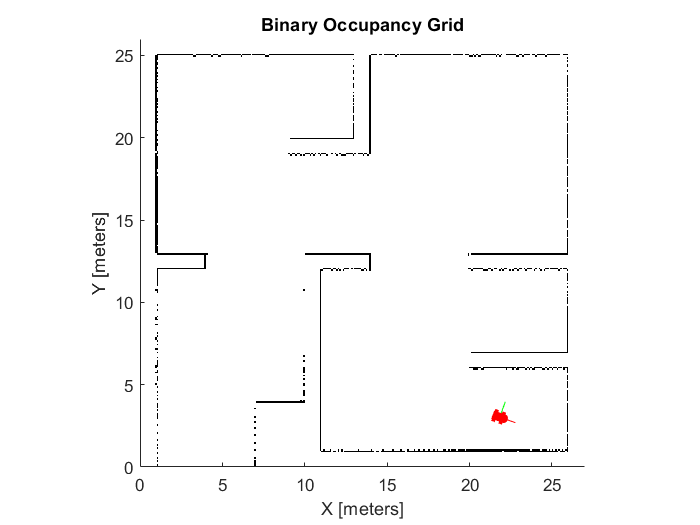
这个例子展示了如何使用距离传感器读数和差动驱动机器人的机器人姿态来创建环境地图。
在Simulink中规划差动驱动机器人的路径万博1manbetx
这个例子演示了如何在Simulink®中执行给定地图上的两个位置之间的无障碍路径。万博1manbetx
运动建模
了解移动机器人运动学方程的细节,包括独轮车,自行车,差速器,和阿克曼模型。
这个例子展示了如何在一个环境中建立不同的机器人运动学模型并进行比较。
机器人控制
纯追求控制器的功能和算法细节。
这个例子演示了如何使用机器人模拟器来控制机器人沿着期望的路径前进。
用Simulink控制凉亭差动驱动机器人万博1manbetx
本实例演示了如何利用Simulink在Gazebo联合仿真中控制差动驱动机器人。万博1manbetx
状态估计
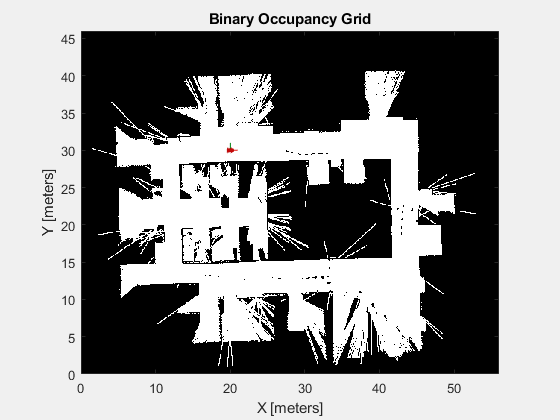
使用stateEstimatorPF粒子滤波时,必须指定粒子数、初始粒子位置和状态估计方法等参数。
粒子滤波器是一种递归的贝叶斯状态估计器,它使用离散粒子来近似估计状态的后验分布。
粒子滤波是一种基于采样的递归贝叶斯估计算法stateEstimatorPF对象。
特色的例子




你也可以从以下列表中选择一个网站: