Manipulator Algorithm Design
Robotics System Toolbox™ manipulator algorithms support workflows related to rigid body, articulated, and serial-link robots. You can import robot models from URDF files andSimscape™ Multibody™models usingimportrobot, or load an existing model withloadrobot. Use these robot models for many different robot tasks:
Define your机器人模型using arigidBodyTreeobject composed of rigid bodies with fixed, revolute, or prismatic joints. Generate joint configurations, define dynamics properties for inertial effects, and use joint- and task-space motion models to simulate robot motion.
Performinverse kinematicsto get joint configurations based on desired end-effector positions. Specify additional robot constraints other than the model parameters, including aiming constraints, Cartesian bounds, or pose targets.
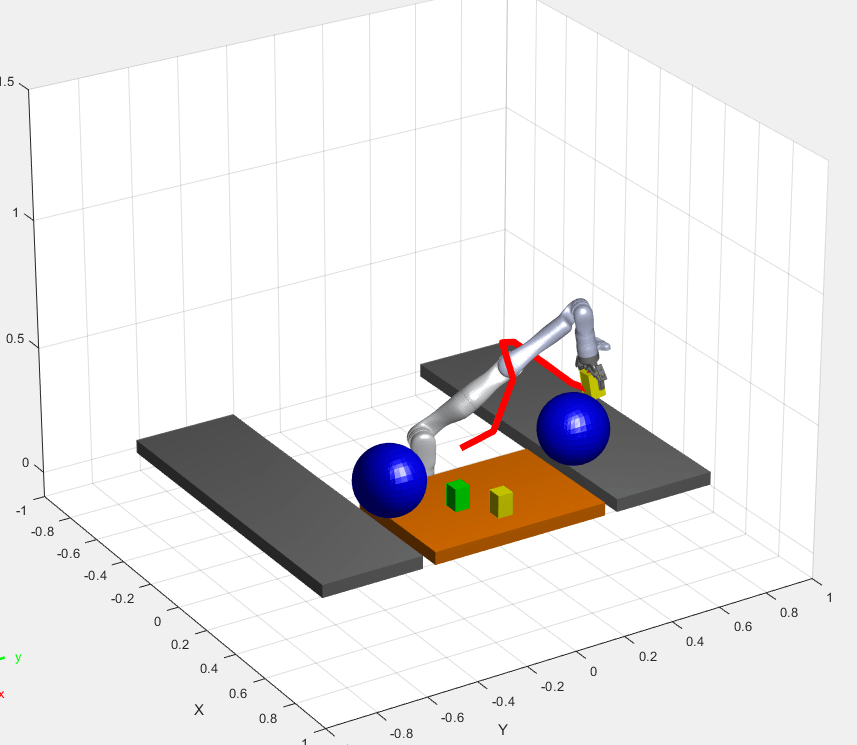
Perform运动规划using your robot models and a rapidly exploring random tree (RRT) path planner.
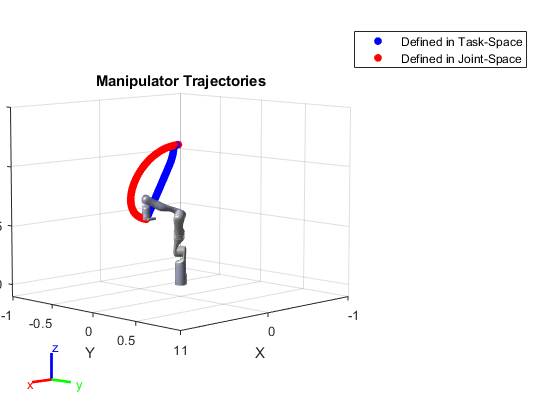
Generatetrajectoriesbased on waypoints and other parameters with trapezoidal velocity profiles, B-splines, or polynomial trajectories.
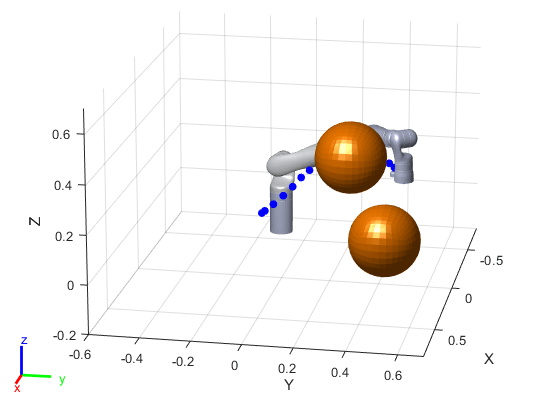
Check forcollisionswith obstacles in your environment to ensure safe and effective motion for your robot.
Categories
- Robot Models
Rigid body tree models, forward kinematics, dynamics, joint- and task-space motion models - Inverse Kinematics
Manipulator inverse kinematics, kinematic constraints - Manipulator Motion Planning
Path planning using RRT and rigid body trees - Trajectory Generation and Following
Control manipulator joints to track trajectories - Collision Detection
Collision geometry meshes, collision avoidance and clearance
Featured Examples

You can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- Denmark(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- Italia(意大利语)
- Luxembourg(English)
- Netherlands(English)
- Norway(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)