机器人系统工具箱
Progettazione,Simulazione E Test Di Applicaioni di robotica
机器人系统工具箱™fornisce工具类Ëalgoritmi每progettare,simulareētestare manipolatori,机器人MOBILIēumanoidi。每个I manipolatori E I机器人umanoidi,IL工具箱comprende algoritmi每L'individuazione阿尔collisioni,LA generazione二traiettorie,LA cinematica direttaË反常性ËLA simulazione dinamica mediante乌纳rappresentazione刚体树。每个I机器人MOBILI,comprende algoritmi二映射,localizzazione,路径规划,路径下列电子运动控制。伊尔工具箱fornisce esempi迪riferimento每applicazioni tipiche德拉robotica INDUSTRIALE。Inoltre,comprende UNA书店二MODELLI二机器人INDUSTRIALI disponibili在COMMERCIO,车puoi importare,visualizzareësimulare。
Puoi Sviluppare联合国Prototipo di Robot效率Combinando i Modelli Cinematici E Dinamici Forniti。IL Toolbox Conserente Di Co-Simulare alplicaioni每机器人Connettendosi Direttamene Al Simulatore Robotico Gazebo。PURICARE LA PROGETTAZIONE SULL'HARDWARE,PUOI CHNINETTERTI ALL PIATRAFORME ROBOTICHE,WEALICALEAMEE E DIRESIRE CODICE SORGENTE ANSI C(CONMatlab Coder™O.万博1manbetxSimulink Coder™)。
Inizia Ora:
设计自己的仓库机器人技术和工业处理应用。

Controllare e SimularePińRobotdi magazzino在Un Esempio di Riferimento。
MODELLI迪机器人
costruisci i tuoi modelli di Robot o Urilitizza una libreria di Robot Utilizzati di mailente per modellare scipamente le tue implicaioni di robotica。Puoi importare文件di formato urdf(统一机器人描述格式)o modelli多体的Simscape™每克里米地球赛Tridimensiigeni e Modelli Di Robot Personalizzati。

Caricare未MODELLO刚体树哒乌纳书店二机器人disponibile在COMMERCIO。
Modellazioneècontrollo德尔MOVIMENTO
Modella La Cinematica e la dinamica di base di Robot Mobili E Manipolatori。visualizza e simula il movimento dei机器人每validare gli algoritmi di controllo。

Simulazioni 3D
Valida我青年报MODELLI迪机器人ambienti二simulazione真实世界interfacciandoli CON simulatori fisici 3D。Sincronizza乐simulazioni德尔陀MODELLO万博1manbetx®CON乐迪simulazioni凉亭。

Simulazione sincronizzata TRA的万博1manbetxSimulinké金正日simulatore凉亭。
alloritmi di manipolazione
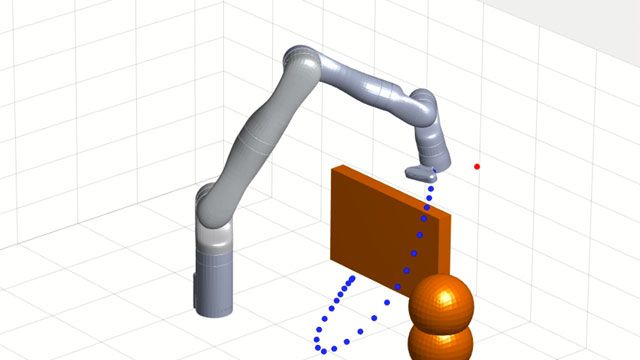
Defoftisci i Modelli Di Robot Utilizzando Rappresentazioni刚体树。Costruisci Controller di Movimento Avanzati E Interfacciali Con i Modelli Di Robot每个完成I Tuoi Progetti di robotica。Inditsua Eventuali Collisioni Ed esegui i Calcoli di Cinematica e Dinamica Inversa Sui Tuii Modelli Di Robot。

Controllo每1L tracciamento二UNA traiettoria sicura utilizzando我blocchi dell'algoritmo德尔manipolatore。
Algoritmi每个机器人MOBILI
CREA mappe二ambienti utilizzando griglie二occupazione,localizza我机器人all'interno阿尔mappeËsviluppa algoritmi二pianificazioneËcontrollo德尔percorso每机器人MOBILI。

eseSuire il Controllo del Movimento di联合国机器人移动Guida diglerenziata su uncorso privo privo di Ostacoli tra正常的waypoint su Una数据mappa。
DISTRIBUZIONE苏硬件robotico
Visualizza I Segnali O Modifica I Parametri Su Modelli Distripiti。Apporta Modifiche Ai Tuoi Algoritmi Mentre Vengono Eseguiti Su硬件。

Testa Gli Algoritmi di联合国人类摩尼罗拉特Collegandi A联合国机器人Fisico。
