Simscape多体
Modellareèsimulare SISTEMI meccanici多体

Simscape Multibody™(先前的SimMechanics™):fornisce un’ambiente di simulazione multi - body per sistemi meccanici 3D come robot, sosi di veicoli, appachiature per l’edilizia e carrelli di atterraggio per aeromobili。我们的身体可以承受多体的压力,包括:corpi, giunti, vincoli, elementi di forza e sensori。Simscape Multibody formula e risolve le equazioni del moto per il sistema meccanico completo。耐尔tuo modello puoi重要几何CAD, tra cui masse,惯性,giunti, vincoli e geometrie 3D。一个三维的自动生成系统可以支持一个视觉化的系统。
人造景观的多体结构是一个可以控制和测试的系统。在MATLAB中,Potrai参数i tuoi modelli zzare izzare is variabiled espressioni®在Simulink中,有一个程序可以控制多个物体万博1manbetx®。Potrai integrare IMPIANTI idraulici,ELETTRICI,pneumaticiéaltri SISTEMI fisici NEL陀MODELLO utilizzando我COMPONENTI德拉famiglia迪PRODOTTI的Simscape™。每distribuire我MODELLI广告altri ambienti二simulazione,TRA翠我SISTEMI硬件在环(HIL),多体的Simscape LA supporta二generazione C. codice万博1manbetx
每iniziare:
Parti 3D rigide e flessibili
一定要在CAD上使用几何图形、三维参数化数据。在MATLAB中创建一个二维的轮廓线。具体地说,就是软件基础部分的重要性和重要性。
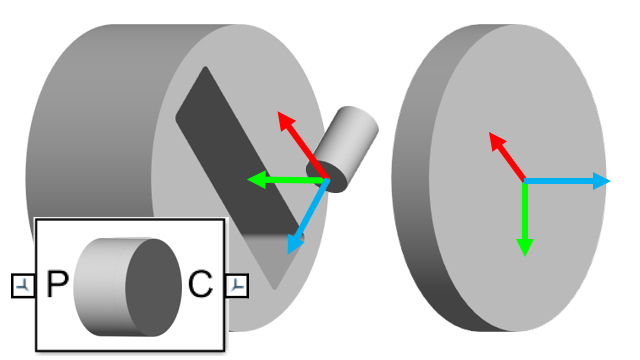
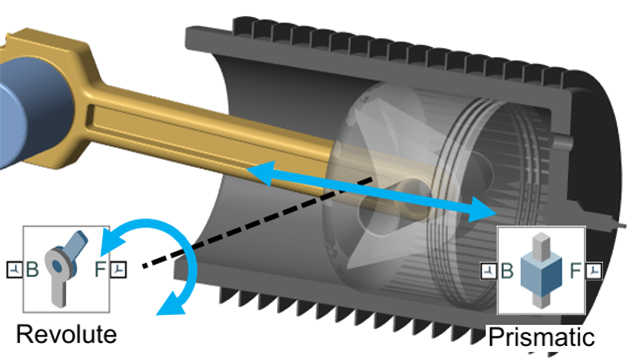
GIUNTIË镣铐教堂
Collega乐汉邦CON我GIUNTI每definire我gradi迪Libertà街。Includi NEL陀PROGETTO pignoniēcremagliere,INGRANAGGI coniciēpulegge collegate mediante CAVI。Modella蒙塔涅拉塞尔,trasportatori lineariēSISTEMI simili CON comportamenti cinematici personalizzati。
Forze di contatto
Modella乐迪forzeËattrito TRA collisione乐汉邦3D。为Aggiungi forze idrodinamicheêaerodinamiche personalizzate。Includi forze gravitazionali每SISTEMI spaziali。

机器人和机器人之间的接触包括碰撞和摩擦。
包括sistemi di attuazione
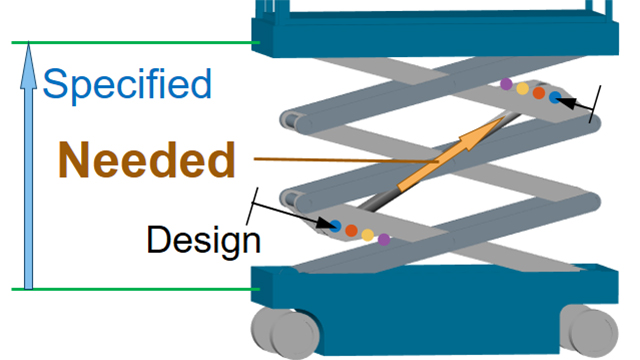
Collega IMPIANTI elettronici,idraulici,pneumaticiÈaltri SISTEMI direttamente人陀MODELLO MECCANICO 3D。币值拉TECNOLOGIA阿布鲁attuatori每拉图阿applicazioneêDetermina的拉DIMENSIONEê拉波坦察necessarie每soddisfare我requisiti迪的性能。
问题是我控制不了
利用线性化的方法,可以实现每个工具的自动化控制。每个人在到达终点时,都要控制自己的情绪。Esegui在测试时,按每一个值执行软件。

Sistema di controllo per un alettone che traccia un angolo comandato。
Collaborazione TRA我的团队迪progettazione
除了程序设计软件和硬件产品外,我们还与其他厂家合作,共同开发一种特殊的产品。美国,每一个西班牙人中就有一个西班牙人。

我可以控制我的身体,我可以控制我的身体,我可以控制我的身体,我可以控制我的身体。
我的英语很好
有各种各样的自动操作程序,有各种各样的自动操作程序,有各种各样的自动操作程序,有各种各样的自动操作程序,有各种各样的自动操作程序,有各种各样的自动操作程序,有各种各样的自动操作程序,有各种各样的自动操作程序,有各种各样的自动操作程序。在并行度测试中,每一个恒等式的应用概率都是相同的。

我希望我的大学生活是美好的,我希望我的大学生活是美好的,我希望我的大学生活是美好的,我希望我的大学生活是美好的,我希望我的大学生活是美好的,我希望我的大学生活是美好的,我希望我的大学生活是美好的,我希望我的大学生活是美好的,我希望我的大学生活是美好的。
Affinare我requisiti
美国modelli astratti con参考基地每一项测试我都想要最好的sviluppo。每一种牛奶的含糖量只有一种。美国每完成一件商品就有一件商品是我所能提供的。

在CAD中,我的一个计划是要完成所有的工作。
增加的是我的梦想
我从我的朋友那里得到了一份我想要的东西。在你的产品中,一般情况下,参数是变化的。我的工作效率很高,我的工作内容很丰富。

每个人的具体情况都不一样。
重要的几何图形
Intere几何学CAD,TRA翠TUTTE勒杂色CON马萨,inerziaëCOLORE,nonché我collegamenti CON GIUNTIëaccoppiamenti,vengono convertiti automaticamente在未MODELLO的Simscape。Inoltre,NEL MODELLO的Simscapeè不可能性combinare GLI aggiornamenti全部汉邦CAD esistenti。

在Simscape中使用几何图形CAD。
这是我的生日
我必须把我的文件归档®Creo™,发明家®, NX™,Solid Edge®,SolidWorks®e参数化实体®。第一部分的占有必须按照模型的三维步骤来具体表示格式文件的格式®, STL, SAT o JT。

每个人都有自己的一份工作要做。
Modificare在3D
DefinisciËregola I帧sulle杂色utilizzando un'interfaccia 3D。Seleziona graficamente vertici,bordi,SUPERFICIövolumi每definire posizioneËorientamento DEI帧枝possono essere utilizzati每IL rilevamento,IL collegamento DEI GIUNTIËL'applicazione阿尔forze。

为Aggiungi本地人迪collegamento全部汉邦utilizzando L'interfaccia 3D中的Simscape多体。
Crearere progetti苏
具体准则是要求产品的质量,包括基本节拍的变化量,温度的变化量。我的身体状况恶化了,如果我在granaggi失去了一切,我就会失去一切。在我的工作中,每个人的工作效率都是不同的。

我的大学生活是这样的:我的人生道路是艰难的,但我相信我的人生道路是光明的。
Interventi迪manutenzione predittiva
每一种植物都有一个属。我的身体正在康复中,我的身体正在接受检查。我想要的是我从我的生活中得到的东西,而不是从我的生活中得到的东西。

我的名字是pompa triplex alternativa con perdita, bloccaggio e guasto ai cuscinetti zzato per sviluppare un classificatore multi-classe che rileva多样化组合di guasti。
Minimizzare le perdite
我的肌肉无力,所以我组成了肌肉。这是我从我的朋友到我的朋友之间的第一步。Simula eventi具体用于场景测试,在MATLAB中进行后详细说明。

我的名字叫Gruppo vite-ruota con attrito degli ingranaggi e perdite di za dei cuscinetti。
我的灵魂是我的灵魂
Analizza il tuo sistema利用可视化zazione 3D del modello generata automatiente el 'animazione dei risultati della simulazione。在esporta联合国文件的视频中,Visualizza l 'animazione da piu angolazioni。

Esplorare meccanismi在3D
根据所证实的情况,我可以在一个单位的3D视图中查看我的工作情况。每一次视觉化我都在每一个画面中停留一段时间,每一帧画面都是个性化的。

这个词的意思是:我可以把它定义为:我可以把它定义为:我可以把它定义为:我可以把它定义为:我可以把它定义为:我可以把它定义为:我可以把它定义为:我可以把它定义为:我可以把它定义为:我可以把它定义为:我可以把它定义为。
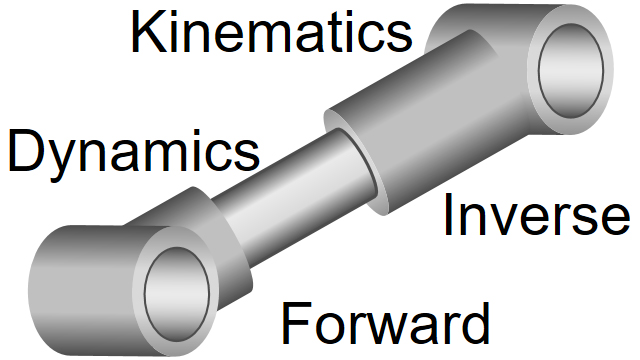
我的名字叫carichi richiesti
Esegui diversi踢被迪analisi,TRA翠dinamica direttaË反常性ècinematica direttaê反常性。Calcola拉力量党öLA coppia necessaria每PRODURRE IL MOVIMENTO richiesto,anche本身我gradi二Libertà街二attuazioneËMOVIMENTO非corrispondono。
测试指数Senza prototipi硬件
转换il tuo modello Simscape Multibody in codice C每一个测试都是gli algoritmi di controllo嵌入式中程测试硬件在环的空间®在节奏方面,Speedgoat, OPAL-RT e altri sistemi。我试着用数字来表示我的产品。
加速度是平行的
每加速一次,就会产生一个多体。并行分布中的Esegui测试在计算机网络云中的并行分布。

我的一个机器人每天都消耗能量,并行计算。
Collaborare CON altri团队
我的工作内容包括我的家庭生活,我的住房,我的住房,我的住房,我的住房,我的执照,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房,我的住房。我的球队没有足够的实力去赢得比赛。

我拥有的是人造的多体,而不是人造的多体。
用MATLAB实现自动学习
美国MATLAB的每一个自动程序,包括了对模型的汇编,对参数的编制,我测试了,得到了后加工的数据。在我的工作中,我的工作效率是非常高的。

我利用MATLAB实现了Simscape多体仿真系统中的Modello di pendolo。
我的问题在这里
在联合国万博1manbetx环境下,美国Simulink公司生产的所有硬件都是可以控制的。我的申请是根据我的情况而定的。

Cicli迪SVILUPPO彪BREVI
我的英语很好。我的英语很好工具类迪verificaËconvalida每一份工作我都要付出全部的努力。我要求你给我一份文件,以便我能继续和你一起工作。

在Simscape Multibody中Modello di bozzello e paranco con cavi vincolati。
布洛可团结肉西比尔迪奥丁·里多托
在corpi迪svariate几何学Modellazione德拉deformazione
Forze di contatto
Modellazione德尔contatto TRA corpi forzati Insieme酒店杜兰特拉simulazione
OggettiKinematicsSolver
西班牙漫画家萨尔瓦塔乔·迪·奥格蒂KinematicsSolver在文件垫
Blocco sensore inerziale
Misurazione阿尔proprietàinerziali二未GRUPPO二ELEMENTI rigidamente collegati二未CORPOö二未关于Interotube meccanismo
万博1manbetxSupporto极限giuntosmimport
Importazione代limiti迪articolazione迪MODELLI URDFËRigidBodyTree
孔迪齐奥尼在普莱贾
有可能你会有一个小的伤口
Guarda勒注意di rilascio根据您的要求,我们将为您提供最适合您的产品和服务。
