ROS工具箱
Progettazione,Simulazione E Distribuzione Di Applicaioni基础苏ROS
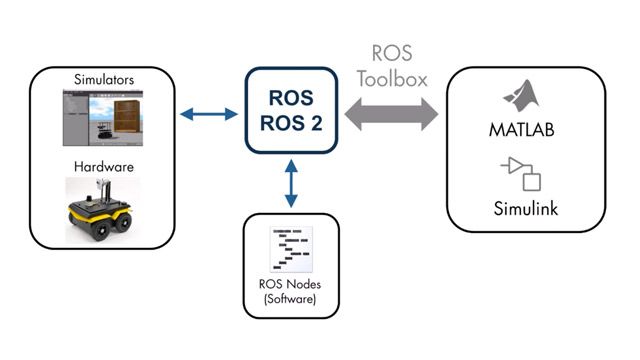
ROS工具箱提供了MATLAB的接口®e 万博1manbetxsimulink.®每个机器人的Al Sistema Operativo(ROS E ROS 2),E同意DI CRARE UNA RETE DI NODI ROS。IL Toolbox Comprende Funzioni Matlab E Blocchi 万博1manbetxSimulink Per Importare,Analizzare E Riprodurre i Dati Ros Registrati文件Rosbag。Inoltre,OntèConisibileConnettersi A UNA Rete ROS在Diretta每Accedere Ai Messaggi Ros。
我的工具箱里有一个安装在凉亭里的机器人的模拟器。ROS Toolbox 万博1manbetxsupporta la generazione di codice c++ (conMatlab Coder™E.万博1manbetx仿真软件编码器™),Che Consente Di FayerArity自动名称Nodi ROS DA UN Modello Simulink E分布万博1manbetx式A联合国硬件Simulato O Fisico。IL 万博1manbetxSupporto A外部模式di simulink pe万博1manbetxrmette divestifizare messaggi e Movificare i Parametri Mentre Il Modelloè在Esecuzione Su硬件。
Inizia Ora:
Connessione一个Una Rete ROS
活性氧或活性氧2。每两种原料都要用内哌酮。这是一种新型的植物。

Connettersi一个Una Rete ROS。
Configurazione della Rete Ros
Crea e Defoftisci La Tua Rete ROS O ROS 2 PAR COMUNICAZIONE TRA DISCOSIVI各种不同。Configura Vari Nodi ROS每分布ATTIVITàEFINFICAZIONI。

ESEMPIO DI RETE ROS 2。
出版商用户用户
invia e icilyvi messaggi ros o ros 2 utilizzando联合国aragomento con semantiche di tipo publish-subscribe。

每个注册表的模拟万博1manbetx模型都可以在velocità delle ruote上感知。
Servizi e azioni
Urilizza Un'Architettura客户 - 服务器每个Inciare Richieste,eSebuireAttivitàeotEnere联合国在申请中的反馈。

Interazione客户端 - Server Mediante Servizi E Azioni ROS。
服务器di parametri.
utilizza i server di parametri ros每个Memorizzare opzioni di Configurazione每个不同的Nodi e Consenterire la Riconfigurazione Dinamica dei Nodi。

Modello 万博1manbetxSimulink Che Cho Interroga e importa parametri ros每controllare la selezione del Cambio del Veicolo。

Flusso di lavoro per la selezione dei dati ros da文件rosbag。
Messaggi Integatati.
Urilizza Una Libreria di Pacchetti di Messaggi Ros 万博1manbetxSupportati每Le Tue Applicazioni ROS。

Esempio di messaggi ROS支万博1manbetx持。
Messaggi Personfizzati.
Aggiungi Nuovi Tipi di Messaggio每Le Tue Implicaioni ROS O ROS 2 Urilitizzando L'Assistenza Perseaggi Personfizzati。

Generare messaggi personalizzati ROS 2。
Generazione di nodi
Perena Codice C ++ Per Applicazioni Autonome Che UtilizzanoFunzionsitàROSo ROS 2。

从Simulink生成一个独立的ROS 2节点。万博1manbetx探索图库(6张图片)

每个控制器的模拟万博1manbetx模型是一个机器人在模拟basato的运动中。
