ドイツ航空宇宙センター(DLR)のロボット工学・メカトロニクス研究所による,モデルベースデザインを使用した自律型ヒューマノイドロボットの開発
課題
ソリュ,ション
結果
- プログラミングの欠陥が排除
- 複雑な機能を数時間で実装
- 学生による高度なコントロ,ルの開発が可能
“モデルベースデザインと自動コード生成により,敏捷贾斯汀の複雑な53の自由度に対処できます。モデルベースデザインがなければ,困難なリアルタイムパフォーマンスを実行する複雑なロボットシステムなどのコントローラーの構築は不可能でした。」
Berthold Bäuml氏,DLR
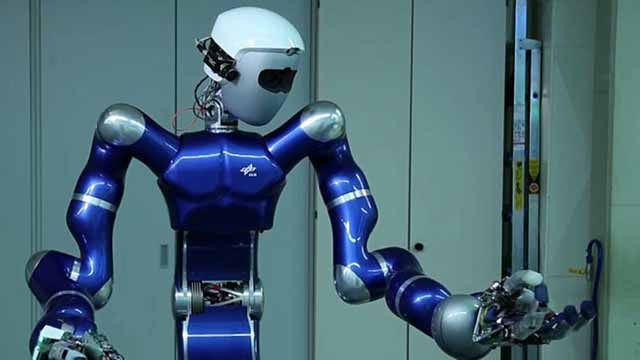
德国中心的皮毛空气和Rundfahrt (DLR,ドイツ航空宇宙センター)のロボット工学・メカトロニクス研究所(RMC)のエンジニアおよび研究者は,環境を学習し,環境と対話することが可能なロボットの開発を行っています。その中には敏捷贾斯汀という,2本の手をも世界最先端のヒュマノドロボットがあります。敏捷贾斯汀には上半身に 19、手に 26、モバイル プラットフォームに 8、全部で 53 の自由度があります。頭部のステレオ カメラと RGB-D センサー、すべての関節のトルク センサー、指の肌の触覚センサーが環境を感知します。
DLR RMCチームは,敏捷贾斯汀の高度なコントロール,キャリブレーションおよびパス計画のアルゴリズム開発に,MATLAB®およびS万博1manbetximulink®を使用したモデルベスデザンを利用しました。
DLRの自律型学習ロボットラボの責任者であ贝特るBauml氏は次のように述べています。“MATLABおよび仿真万博1manbetx软件を使用したモデルベースデザインは,高度なロボットシステムの設計に必要な,幅広いソフトウェアドメインをカバーします。」「これにより、複雑なメカトロニクス システムおよびコントローラーのシミュレーション、リアルタイム HIL テスト、信号および画像処理、データ解析と可視化のためのコード生成が可能です。
課題
高度なヒューマノイドロボットには,さまざまなセンサーからの入力を迅速に処理し,連続軌跡を計画し,何十個もある関節の動きを同時に管理する制御システムが必要です。
最初は,DLR RMCエンジニアは,ロボットの手と腕の制御アルゴリズムを別個にC / c++で作成していました。,指先から肩まですべての自由度の1つの制御ループを作成し始めると,そのシステムは非常に複雑で,手作業でコーディングできないことがわかりました。
DLRはロボットソフトウェアフレームワークaRDxを新たに開発し,この挑戦に対応しようとしましたが,設計モデルからコードを自動的に生成して,ハードウェアインザループ(边境)テストを実行することができるツールも必要でした。さらに,大学院生がロボット制御システムを独自に,迅速に開発するために使用できるルが必要でした。
ソリュ,ション
DLR RMCは,敏捷贾斯汀やその他の自律型ロボット向けの高度な制御システムの開発のためにMATLABおよび仿真软件を使用したモデル万博1manbetxベースデザインを採用しました。
個々の関節用に,チ,ムは微分方程式を使用したプラントモデルを作成しました。これはS万博1manbetximulinkにS-Functionとして組み込まれました。
万博1manbetx仿真软件および控制系统工具箱™を使用して,比例——積分——微分(PID)コントローラーを作成し,シミュレーションによって制御パラメーターを調整しました。
万博1manbetx仿真软件编码器™を使用して,コントローラーモデルからCコードを生成し,それをQNXリアルタイムオペレーティングシステムを実行するPCに配布しました。边境テストにより,関節装置の大幅な弾性やモータートルクの非線形性だけでなく,センサーノイズと精度を補正することができました。
制御設計の検証後,チームは生産ターゲットである德州仪器™社製DSP向けのCコードを生成しました。
そして胴体や腕などの複数の関節をもつ敏捷贾斯汀のコンポーネント用のモーションコントローラーを開発しました。さらに複雑な,大きくて重いメカニズムのダイナミクスを処理するために,デカルトインピーダンスの制御システムを仿真万博1manbetx软件で設計しました。
単関節コントローラーと同様に,万博1manbetx仿真软件でパラメーターを調整し,仿真软件编码器を使用して边境テスト用のコードを生成しました。
テスト中は,Stateflow®を使用して,バスケットを握ったり持上げたりなどのタスクの順序を設定しました。
制約付きの非線形最適化を実行して体全体の動きを計画するために,优化工具箱™で利用可能な逐次二次計画法のアルゴリズムを適用しました。
チームは,ステレオカメラおよびRGB-Dカメラから取得した画像から手のマーカーを特定するために,MATLAB的图像处理工具箱で™を使用して,自動キャリブレーションアルゴリズムを開発しました。このアルゴリズムは,信号处理工具箱™のバタワースフィルターを使用して,マーカーの位置推定からノイズを削除します。
DLRは,敏捷贾斯汀が環境から学習する機能を強化するために,モデルベースデザインを使用して新しいコントローラーを開発しています。
結果
プログラミングの欠陥が排除.Bäuml氏は次のように述べています。“万博1manbetx仿真软件编码器を使用したコード生成によって,制御設計をC / C +で手作業でコーディングしていた時に取り込まれたプログラミングの欠陥が排除されました。”“手作業でのコーディングを試みていた時よりもさらに複雑なアルゴリズムの設計を行っているにもかかわらず,機能面での欠陥が約80%削減されました。」
複雑な機能を数時間で実装.Bäuml氏は次のように述べています。“投げる動きの場合,贾斯汀のコントローラーは20の自由度を連携させて,最適なTCP軌跡を生成します。」「MATLAB、Simulink および Optimization Toolbox を使用して、この作業をある日の午後に行いました。」
学生による高度なコントロ,ルの開発が可能.Bäuml氏は次のように述べています。“モデルベースデザインを使用するとコードを作成する必要がないため,私たちと共にたった6か月働いただけのエンジニアリングの学生が,53の自由度をもつロボット向けの高度なコントロールを開発できます。”“万博1manbetx仿真软件によって複数のフィードバックループの相互作用に対処でき,複雑なアルゴリズムをグラフィカルに構築および実行できます。」
使用製品
お客様の成功事例をご紹介
カスタマ,リファレンスプログラムに参加する
您也可以从以下列表中选择一个网站: