控制系统工具箱
制御システムの設計と解析
控制系统工具箱™では,線形制御システムを体系的に解析,設計,チューニングするためのアルゴリズムとアプリが提供されています。システムは伝達関数モデル,状態空間モデル,零点-極ゲインモデル,または周波数応答モデルとして指定できます。ステップ応答やボード線図をプロットするアプリ,関数などを用いて,システムの動作を時間領域と周波数領域で解析および可視化できます。
ボードループ整形や根軌跡法などの対話型手法を使用して,補償器のパラメーターをチューニングできます.PIDコントローラーを含め,输出およびMIMO補償器を自動的にチューニングできます。複数のフィードバックループにわたる補償器パラメータを調整することもできます。ゲインスケジューリングコントローラーをチューニングし,設定値追従,外乱の抑制,安定余裕など,複数のチューニング目標を指定できます。また,立ち上がり時間,オーバーシュート,整定時間,ゲインと位相余裕,その他の要件を検証して,設計を確認することができます。
詳細を見る:

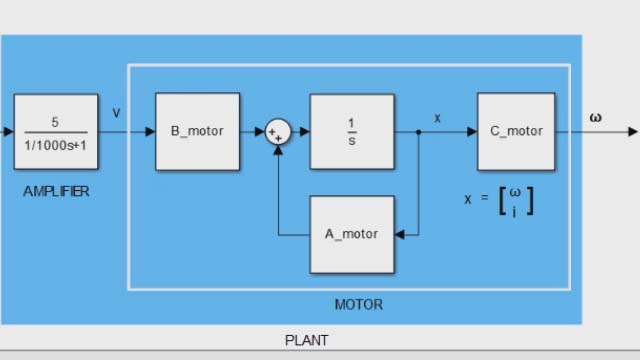
伝達関数および状態空間モデル
伝達関数または状態空間表現を使用して線形時不変システムモデルを作成します.PIDコントローラーおよび周波数応答データを操作します.SISOまたは米姆,および連続または離散のモデルシステムを作成できます。基本的なモデルを直列,並列,またはフィードバックで接続することで,複雑なブロック線図を構築します。
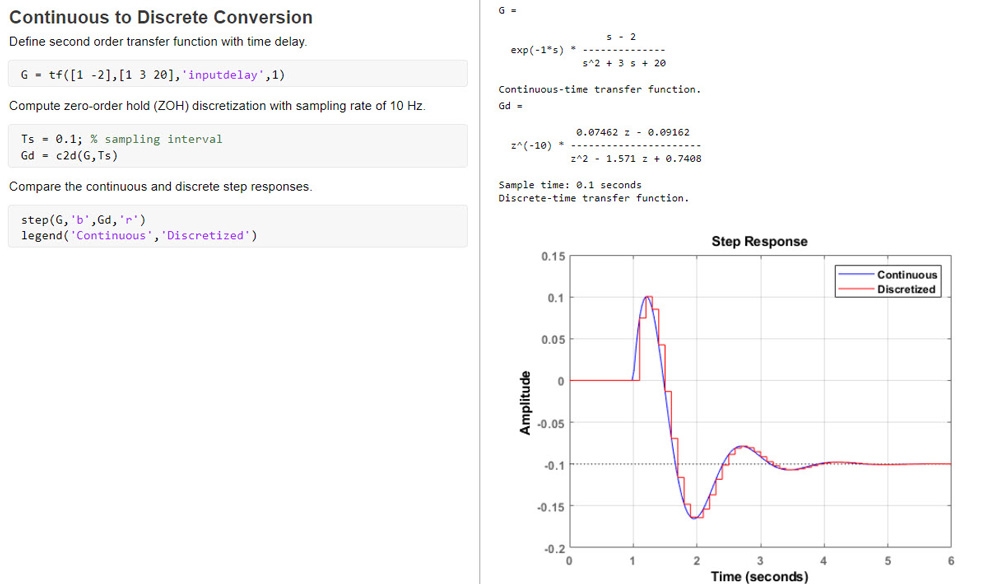
モデル離散化
コマンドライン関数または対話式のライブエディタータスクを使用して,動的システムモデルをリサンプリングし,連続時間領域から離散時間領域へモデルを変換します。ゼロ次ホールド,双一次(Tustin)極——零点マッチング,その他のレート変換手法を使用します。
ギャラリーを探す(2画像)
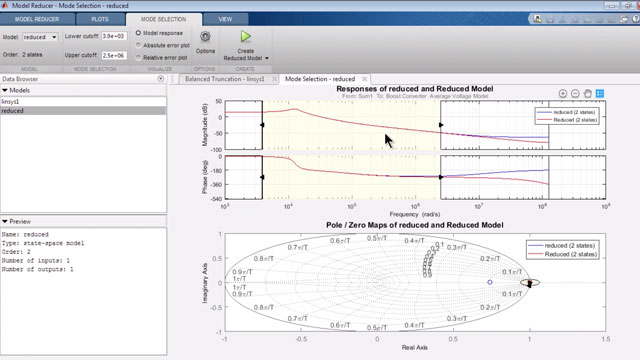
モデルの低次元化
模型减速器アプリ,ライブエディタータスク,またはコマンドライン関数を使用し,アプリケーションにとって重要なモデルダイナミクスを保持しつつ,プラントまたはコントローラーモデルの次数を対話的に低次元化できます。平衡化打ち切り,極——零点簡略化,モード選択の手法を使用できます。
時間領域および周波数領域の解析
線形システムアナライザーアプリを使用して,ステップ応答,インパルス応答,ボード,ニコルス,ナイキスト,特異値,零点——極のプロットを用い,複数のモデルの時間および周波数レスポンスを表示および比較します。立ち上がり時間,整定時間,および最大オーバーシュートなどのシステム特性を検査します。

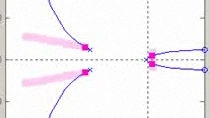
安定性解析
ゲイン余裕,位相余裕,および交差周波数を計算します。動的システムの極と零点の位置をグラフィックスと数値で検証します。線形モデルの極の減衰比,固有振動数,および時定数を計算します。

ゲイン余裕,位相余裕,および交差周波数の計算
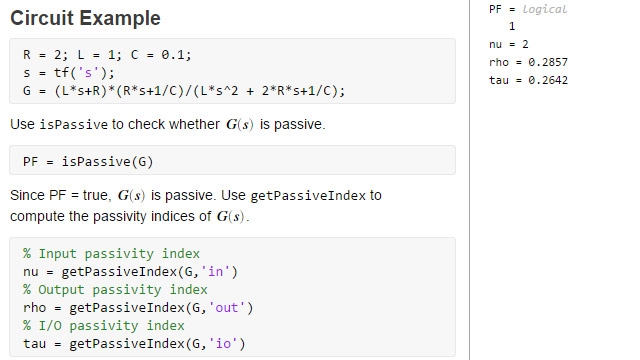
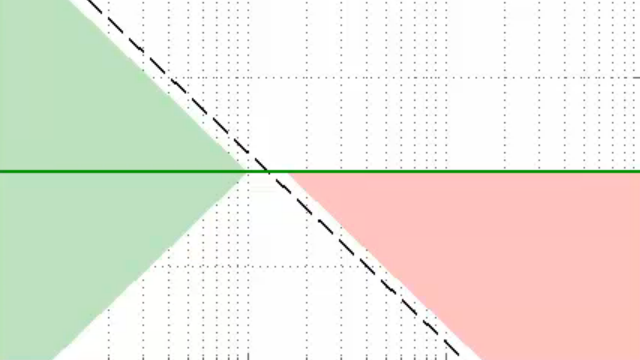
受動性およびセクター境界
線形時不変システムの受動性のさまざまな測定値を計算します。受動性および任意の円錐セクター境界についてシステムを解析します。
ギャラリーを探す(2画像)
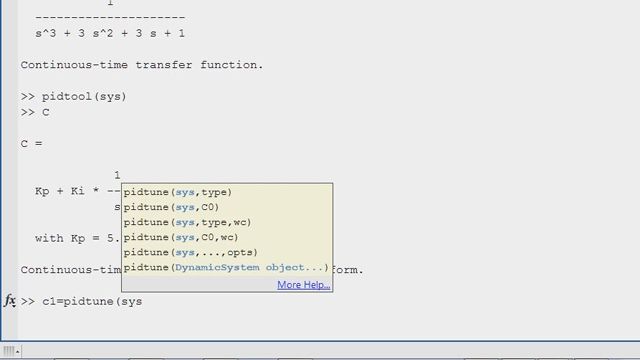
PID調整
PID調整器アプリ,ライブエディタータスク,またはコマンドライン関数を使用して,自動的にPIDコントローラーゲインを調整し,パフォーマンスとロバスト性のバランスを取ります。望ましい応答時間や位相余裕などの調整パラメーターを指定します。連続または離散のPIDコントローラーを調整します。
プラントダイナミクスの対話型推定
系统辨识工具箱™を使用して,測定された入出力データからPID調整器アプリ内で直接プラントモデルを作成できます。または,ライブエディターを使用してプラントダイナミクスを識別し,PIDコントローラーを調整します。
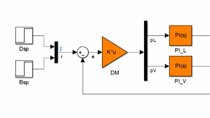
二自由度PID制御
2自由度の(二自由度PID)コントローラーを調整します.1-DOF PIDコントローラーの代わりに二自由度PIDコントローラーを使用すると,設定点の追従でオーバーシュートを大幅に増加させることなく,より優れた外乱の抑制が可能です。

閉ループ応答の監視
調整すると動的に更新されるステップ応答,ナイキスト,その他のプロットを使用して,閉ループと開ループの応答を可視化します。立ち上がり時間,最大オーバーシュート,ゲイン余裕,位相余裕など,時間領域および周波数領域の設計要件を指定および評価します。
マルチループ設計
複数の输出ループで構成されるコントローラーを調整します.SISOループをそれぞれ逐次閉じ,ループ間の関係を可視化し,各ループを繰り返し調整することで,全体的な性能を最適化できます。

ギャラリーを探す(2画像)
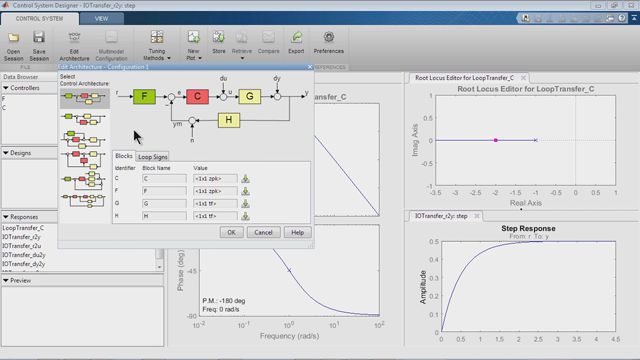
输出およびMIMOループ
制御システム調整器アプリまたはコマンドライン関数を使用し,ゲイン,PIDコントローラー,または低次フィルターなどのシンプルで調整可能な要素で,输出またはMIMO制御システムアーキテクチャーをモデル化および調整します。マルチループ制御システムで複数のループを一緒に調整します。
時間領域と周波数領域の目標
追従性能,外乱の抑制,ノイズ増幅,閉ループ極配置,安定余裕などの調整要件を指定および可視化します。コントローラーパラメーターを自動的に調整して,必須要件(設計制約)を満たし,他の要件(目標)もできる限り満たします。
プラントモデルのセットに対する調整
パラメーターの変動,動作条件の変化,およびセンサーやアクチュエータの故障に起因するプラントダイナミクスの変化に強いコントローラーを設計します。

プラントパラメーターの変動に強いコントローラーを設計
万博1manbetx仿真软件でのゲインスケジュールコントローラー
万博1manbetx®で,変動PIDコントローラー,変動伝達関数,変動ノッチフィルター,変動ローパスフィルターなどのブロックを使用して,ゲインスケジュール制御システムをモデル化できます。

万博1manbetx仿真软件でゲインスケジュールコントローラーをモデル化するためのライブラリ
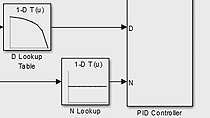
ゲイン曲面の調整
ゲイン曲面係数を自動的に調整し,システムの動作包絡線全体でパフォーマンス要件を満たし,操作点間での滑らかな遷移を実現します。操作条件によって異なる要件を指定します。設計の操作範囲全体における調整結果を検証します。
等/ LQGおよび極配置
連続および離散の線形2次レギュレーター等)および線形2次ガウス型(LQG)コントローラーを設計します。フィードバックゲイン行列を計算して,希望位置に閉ループの極を配置します。
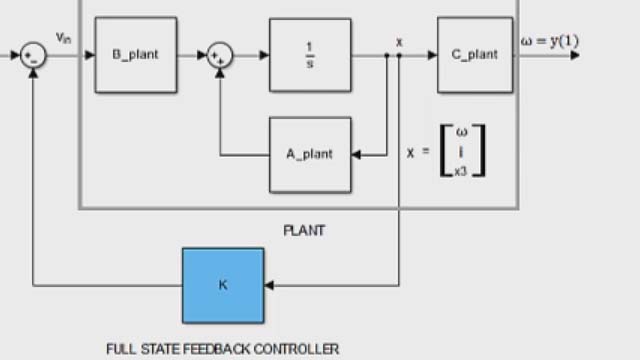
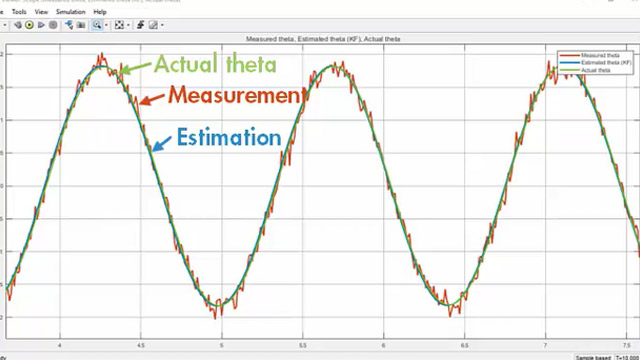
カルマンフィルター
線形定常状態および時変カルマンフィルターを設計およびシミュレーションします.MATLAB编码器™および仿真软件编万博1manbetx码器™を使用してこれらのフィルターのC / c++コードを生成します。
非線形の状態推定器
MATLAB®および仿万博1manbetx真软件で拡張カルマンフィルター,アンセンテッドカルマンフィルター,または粒子フィルターを使用して,非線形システムの状態を推定します.MATLAB编码器および仿真软件编码器を使用してこれらのフィルターのC / c++コードを生成します。
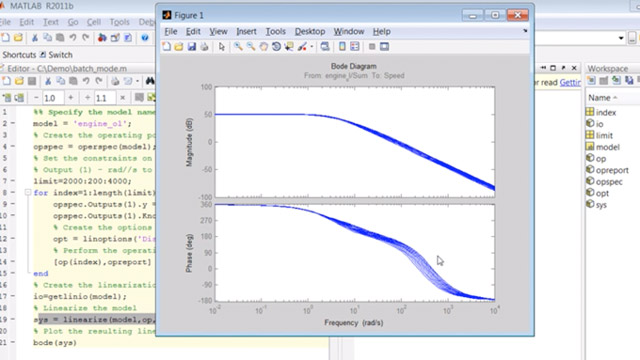
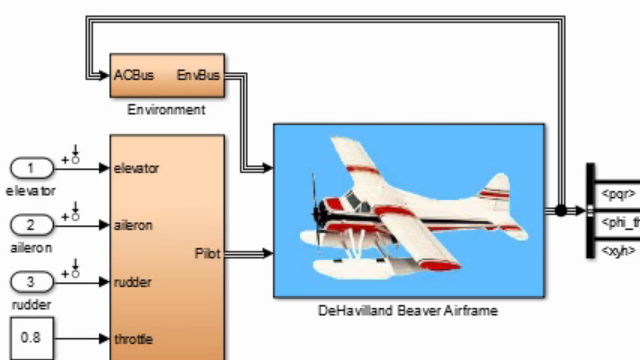
線形解析
万博1manbetx仿真软件控制设计™で線形解析ツールを使用し,仿真软件モデルを線形化します。ステップ応答,インパルス応答,ボード,ニコルス,ナイキスト,特異値,零点——極のプロットを使用し,線形化モデルの時間および周波数応答を計算します。
補償器の設計
万博1manbetx仿真软件控制设计を使用し,仿真软件でモデル化された输出フィードバックループをグラフィックで調整します。対話的なボード,根軌跡,およびニコルスグラフィカルエディタでコントローラー極,零点,ゲインを追加,修正,削除して,コントローラーを設計します。
補償器調整
万博1manbetx仿真软件でモデル化されたPIDコントローラーのゲインを自動的に調整します.Simulink控制设计の制御システム調整器アプリまたはコマンドラインツールを使用し,仿真软件で任意の数のフィードバックループに分散された制御要素のゲインとダイナミクスを自動的に調整します。
新機能
ライブエディタータスク
モデルの変換と制御設計タスクを対話的に実行し,MATLABコードをライブスクリプトで生成
これらの機能および対応する関数の詳細については,リリースノートを参照してください。