使用Live Editor任务的交互式控制设计
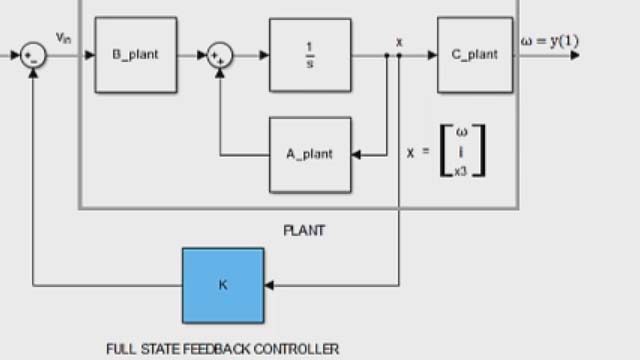
在19B中,我们介绍了实时编辑任务,您可以添加到实时脚本以执行特定的操作集。假设这是您需要遵循的工作流程,以便从测量的工厂数据设计控制器。Live Editor任务让您在一个地方完成所有工作流程步骤,节省您的时间并消除编写代码的需要。让我们看看如何使用这些实时编辑器任务来估计来自测量的工厂数据的状态空间模型,使识别的模型离散,然后为离散工厂设计控制器。
此处的代码加载并绘制测量的电厂数据。您可以内联或在脚本的右侧显示此代码的输出。要处理此工作流的第一步,我们将使用“估计状态空间模型”任务。要查找此任务,我们将转到Live Editor选项卡并单击任务。在这里,您可以从不同的工具箱中找到实时编辑器任务。这是我们需要的。让我们把它插入我们的现场脚本。正如您在这里看到的,Live Editor任务允许您以交互方式指定参数。选择数据时,它会自动从MATLAB工作区中查找适当的预定义变量,您可以在这些下拉菜单中选择这些变量。通过单击此圆形图标,可以使任务自动运行,并在每次调整任务中的值时更新和显示结果。如果您不了解工厂订单,您可以简单地尝试不同的值。由于任务是自动运行的,当您更改工厂订单时,您将在右侧看到更新的结果。5阶的增加对估计拟合没有多大改善。因此,让我们将顺序设置回4。如果需要,可以在此字段中重命名已识别的模型。使用该任务,我们可以轻松地根据测量数据估计模型,而无需编写任何代码。如果要查看此任务使用的MATLAB命令,可以单击任务底部的箭头来显示这些命令。您还可以通过选择“控制和代码”从“选项”菜单启用此功能。此任务还允许您调整估计算法的参数,例如搜索方法和最大迭代次数。当我们在这里更改一些参数时,您可以看到这些函数是如何自动调用适当的参数的。这节省了您的时间,并且无需搜索特定的MATLAB函数以及可以设置它们的不同选项。
现在,我们将进入工作流的第二步,对已识别的模型进行离散化。为此,我们将使用Convert Model Rate任务。如果您已经知道要使用的任务的名称,只需开始在live脚本中键入其名称,然后从建议列表中选择该任务即可添加该任务。选择模型并指定控制器的采样时间后,可以尝试不同的转换方法,以找到使原始模型和转换后的模型更匹配的方法。
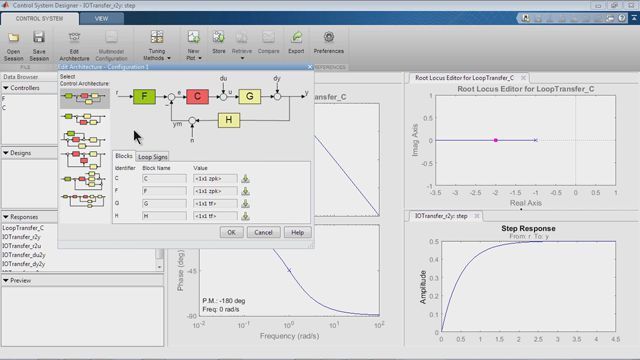
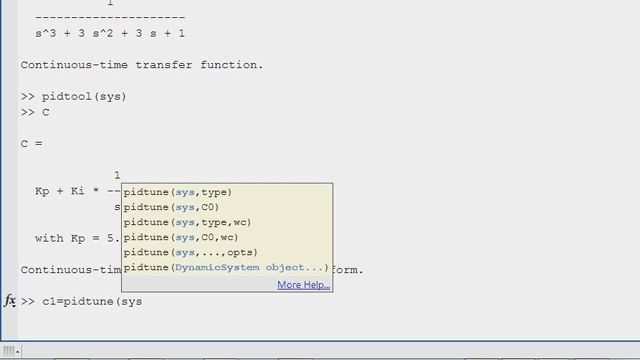
最后一步是为离散化对象设计PID控制器。为此,我们将在Control System Toolbox下添加此任务。选择离散化对象后,可以使用不同的控制器设置(如自由度和控制器类型)进行试验。然后,您可以使用这些滑块微调控制器,这有助于您改变参考跟踪和干扰抑制之间的平衡。通过选中此框,您还可以显示系统响应特性,如上升时间和超调量,并确保控制器满足您的设计要求。
如果您想与他人分享您的工作,您可以简单地与它们分享此实时脚本,并且他们可以使用不同的参数来提出新的控制器设计。或者,您可以通过在每个任务上选择此选项,然后共享生成的代码来隐藏交互式用户界面。
有关实时编辑任务的更多信息,请查看文档。