このペ,ジの翻訳は最新ではありません。ここをクリックして,英語の最新版を参照してください。
extractHOGFeatures
勾配方向ヒストグラム(猪)特徴を抽出
構文
説明
[は,指定した点の位置を中心として抽出した猪特徴を返します。この関数は,特性,validPoints= extractHOGFeatures(我,点)validPointsも返します。これには,その周囲領域が我内に完全に含まれる入力点の位置が含まれます。点に関連付けられたスケ,ル情報は無視されます。
[___= extractHOGFeatures(___,は,前述の構文のいずれかを使用し,名前と値のペアの引数を1つ以上指定したオプションを追加で使用します。名称,值)
例
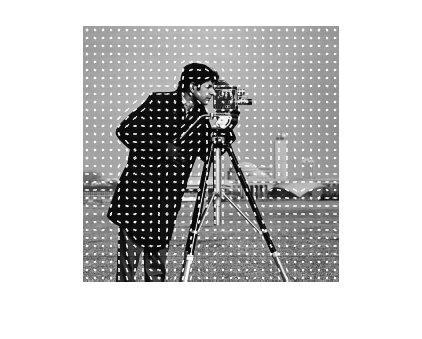
Hog特徴の抽出とプロット
対象の▪▪メ▪▪ジを読み取ります。
Img = imread(“cameraman.tif”);
Hog特徴を抽出します。
[featureVector,hogVisualization] = extractHOGFeatures(img);
Hog特徴を元のメジの上にプロットします。
图;imshow (img);持有在;情节(hogVisualization);
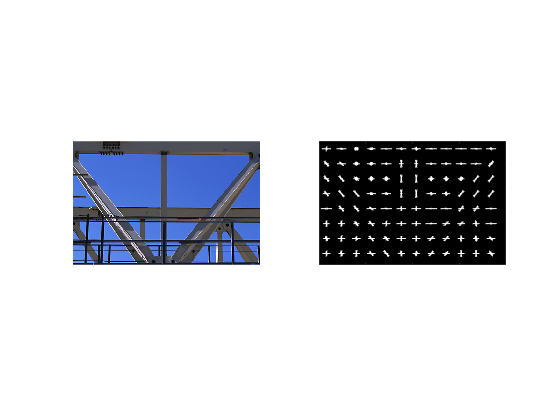
CellSizeを使用したHOG特徴の抽出
対象の▪▪メ▪▪ジを読み取ります。
I1 = imread(“gantrycrane.png”);
Hog特徴を抽出します。
[hog1,visualization] = extractHOGFeatures(I1,“CellSize”[32 32]);
元のメジとhog特徴を表示します。
次要情节(1、2、1);imshow (I1);次要情节(1、2、2);情节(可视化);
コナポントを中心とするhog特徴の抽出
対象の▪▪メ▪▪ジを読み取ります。
I2 = imread(“gantrycrane.png”);
@ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @ @
拐角= detectFASTFeatures(im2gray(I2));最强= select最强(角,3);
Hog特徴を抽出します。
[hog2,validPoints,ptVis] = extractHOGFeatures(I2,最强);
元のメジに最も強いコナを中心とするhog特徴を重ねて表示します。
图;imshow (I2);持有在;情节(ptVis“颜色”,“绿色”);

入力引数
出力引数
特性-抽出されたhog特徴
1行n列のベクトル| p行q列の行列
抽出された猪特徴。1行n列のベクトルまたは P 行 Q 列の行列のいずれかとして返されます。この特徴は、イメージ内の領域または点の位置から局所的な形状情報を符号化します。この情報は、分類、検出、追跡などのたくさんのタスクに利用できます。
特性出力 |
説明 |
|---|---|
| 1行n列のベクトル | Hog特徴の長さnは,。 N = 刺激([BlocksPerImage,BlockSize,NumBins])BlocksPerImage = 地板上((大小(我)。/CellSize- - - - - -BlockSize) / (BlockSize- - - - - -BlockOverlap) + 1) |
| P行q列の行列 | Pは,その周囲領域が入力メジ内に完全に含まれる有効な点の数です。点の位置を抽出する点の入力値を提供します。周囲領域は次のように計算されます。 CellSize. *BlockSize特徴ベクトルの長さqは次のように計算されます。 刺激([NumBins,BlockSize]) |
以下の図は,6のセルを持。

BlockSizeを[2 - 2]に設定した場合,各hogブロックのサescズは2行2列のセルになります。セルのサ@ @ズはピクセル単位です。これはCellSizeプロパティを使用して設定できます。

猪特徴ベクトルは,猪ブロックによって配置されます。セルヒストグラムhyx)は,1行NumBins列です。

以下の図は,ブロック間で1行1列のセルがオーバーラップする猪特徴ベクトルを示しています。

validPoints-有効な点
cornerPointsオブジェクト|BRISKPointsオブジェクト|SURFPointsオブジェクト|MSERRegionsオブジェクト|ORBPointsオブジェクト| [x,y]座標のM行2列の行列
各特性記述子ベクトル出力に関連付けられた有効な点。この出力は,cornerPointsオブジェクト,BRISKPoints、SURFPointsオブジェクト,MSERRegionsオブジェクト,ORBPointsオブジェクト,または[x,y]座標のM行2列の行列のいずれかとして返されます。この関数は,[CellSize. *BlockSize]に等しいサesc esc esc esc esc esc esc esc esc esc esc esc esc。抽出された記述子は,入力と同じオブジェクトタ。領域は,。
可视化- hog特徴の可視化
オブジェクト
Hog特徴の可視化。オブジェクトとして返されます。この関数は、抽出された HOG 特徴を可視化するためのオプション引数を出力します。情节メソッドを可视化出力と合わせて使用できます。Hog特徴の抽出とプロットの例を参照してください。
猪特徴は,等間隔の玫瑰プロットのグリッドを使用して可視化されます。セルサ▪▪ズと▪▪メ▪ジサ▪▪ズによって,グリッドの次元が決定されます。各玫瑰プロットは,HOGセル内の勾配の向きの分布を示します。玫瑰プロットの各花弁の長さは、セル ヒストグラム内における各向きの寄与を示すようにスケーリングされます。ブロットはエッジの方向を表示します。これは、勾配の方向に対して垂直になります。プロットをエッジ方向と共に表示することで、HOG で符号化された形状と輪郭をよりよく理解できるようになります。各 rose プロットは、NumBinsの2倍の花弁を表示します。
次の構文を使用して,小猪特徴をプロットできます。
情节(可视化)は,HOG特徴を玫瑰プロットの配列としてプロットします。 |
情节(可视化,AX)は,hog特徴をax軸にプロットします。 |
情节(___,“颜色”,colorValue)は,小猪特徴のプロットに使用される色を指定します。ここで,colorValueは,カラ値の表で説明されている1行3列のRGBベクトル,色の省略名,または色の完全名として色を表します。 |
詳細
カラ値
| 色の名前 | 省略名 | RGB 3成分 | 外観 |
|---|---|---|---|
“红色” |
“r” |
[10 0 0] |
|
“绿色” |
“g” |
[0 10 0] |
|
“蓝色” |
“b” |
[0 0 1] |
|
“青色” |
“c” |
[0 1 1] |
|
“红色” |
“m” |
[10 0 1] |
|
“黄色” |
“y” |
[11 10 0] |
|
“黑色” |
“k” |
[0 0 0] |
|
“白色” |
“w” |
[1 1 1] |
|








参照
[1]达拉尔,N.和B.特里格斯。“面向人类检测的梯度直方图”,IEEE计算机学会计算机视觉和模式识别会议,第1卷(2005年6月),第886-893页。
拡張機能
バ,ジョン履歴
R2013bで導入
您也可以从以下列表中选择一个网站: