鲁棒控制工具箱
不确かなプラントのためのロバストなコントローラーを设计する
鲁棒控制工具箱™は,プラントの不确実性が存在する场合のパフォーマンスとロバスト性のために制御システムを解析および调整するための关数とブロックを提供します。不确かさをもつパラメーターなどの要素とノミナルダイナミクスを组み合わせることにより,不确かさをもつモデルを作成できます。プラントモデルの不确実性が制御システムのパフォーマンスに与える影响を分析し,不确かな要素の最悪の组み合わせを特定できます.H∞およびμ设计法によって,ロバストな安定性とパフォーマンスを最大化するコントローラーを设计することができます。
このツールボックスは,控制系统工具箱™の自动调整机能にロバスト调整を追加します。调整されたコントローラーは,复数のフィードバックループにまたがる复数の调整可能なブロックで分散化できます。ノミナルプラントのパフォーマンスを最适化しながら,不确実性の全范囲にわたってより低い,最小のパフォーマンスを适用できます。
今すぐ始める:
不确かさをもつパラメーターや考虑されていないダイナミクスなどの不确かな要素と,ノミナルダイナミクスを组み合わせることにより,不确かさをもつ详细なモデルを作成します。不确かな状态空间および周波数応答モデルを使用して,不确かさをもつシステムを表现します。
万博1manbetxSimulink的モデルを线形化する际に,一部のブロックを不确定として指定することによって不确実性を追加できます。
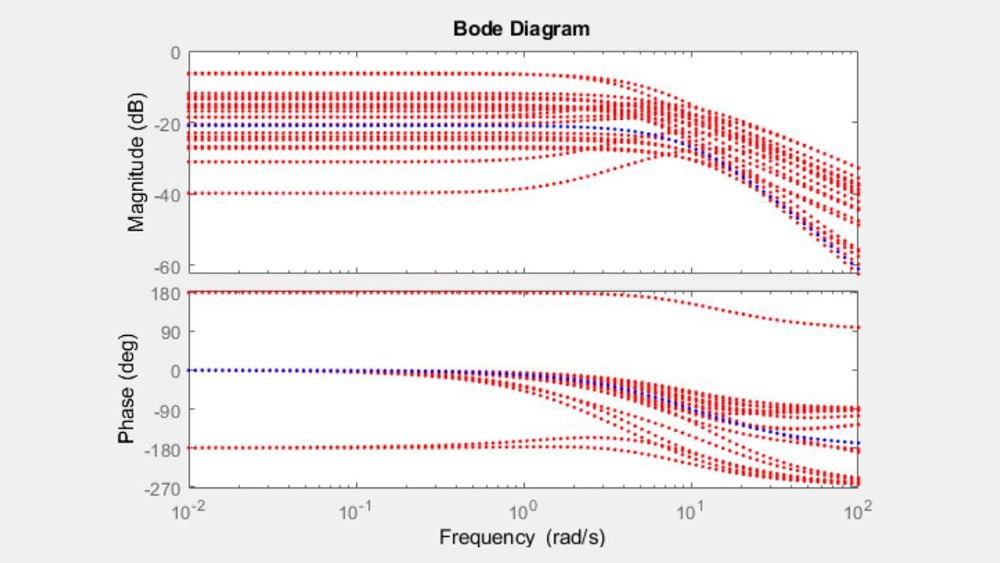
不确かさをもつパラメーターを持ったシステムのボード线図
ロバストな安定性とパフォーマンス
SISOおよびMIMOフィードバックループのディスクベースのゲインと位相余裕を计算します。不确実性が制御システムの安定性とパフォーマンスに与える影响を定量化します。システム固有の不确実性に対するロバストな安定性とロバストな性能余裕を计算します。

従来のゲイン位相余裕よりもロバスト安定なディスク余裕をグラフ化
最悪状况解析
不确かさの要素値の最悪の组み合わせを特定します。トラッキングエラー,感度,およびディスク余裕の最悪値を计算します。ノミナルのシナリオと最悪のシナリオを比较します。
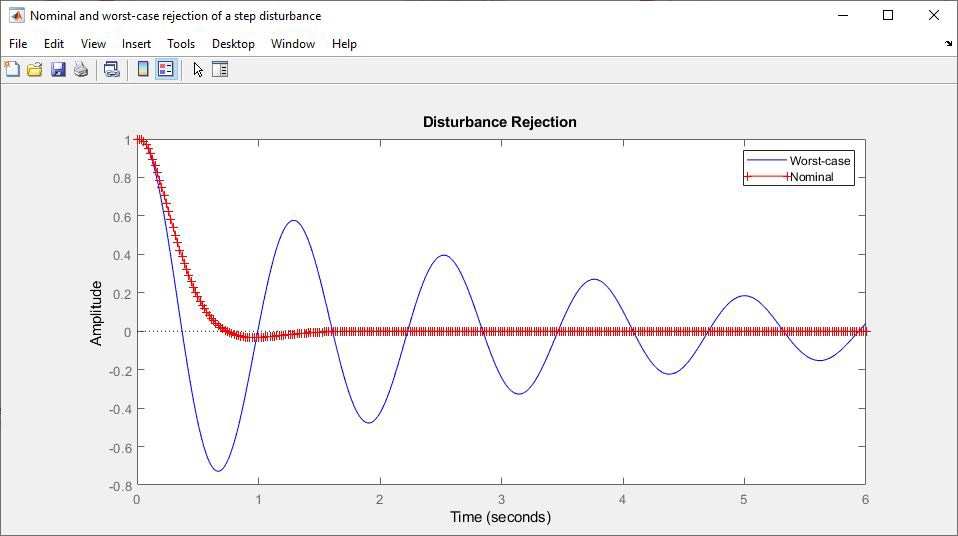
ステップ外乱のノミナルおよび最悪の场合の制御
モンテカルロ解析
指定された不确実性の范囲内で不确かさをもつシステムのランダムサンプルを生成します。不确実性がシステムの时间と周波数応答に与える影响を可视化します。不确かさをもつ状态空间ブロックを使用して,万博1manbetxSimulink中に不确実性を注入し,モンテカルロシミュレーションを実行します。

シミュレーションした结果得られたナイキスト线図
H∞およびμ设计法
H∞やμ设计法などのアルゴリズムを使用して,ロバストなMIMOコントローラーを合成します。
固定制御构造のH∞パフォーマンスを最适化します。混合感度または格洛弗-麦克法兰アプローチを使用して,ループ形成タスクを自动化します。

H∞コントローラーを用いた不确かさをもつ闭ループモデル
不确かさをもつ制御システムのロバスト调整
追従性能,外乱の抑制,ノイズ减衰,闭ループ极减衰,安定余裕などの调整要件を指定します。复数のプラントモデルまたは制御构成を同时に调整します。プラントパラメーターの不确かさの范囲でパフォーマンスを最大化します。时间および周波数応答プロットでコントローラーのロバスト性を评価します。

复数のパラメーターの変化を备えた制御システム调整器(调整后の応答)。
システムのハンケル特异値に基づいた加法または乘法误差法を使用して,モデルの次数を减らします。主要なダイナミクスを维持しながら,H∞およびμ设计法アルゴリズムによって生成されるコントローラーの次数を减らし,余分な状态を排除します。
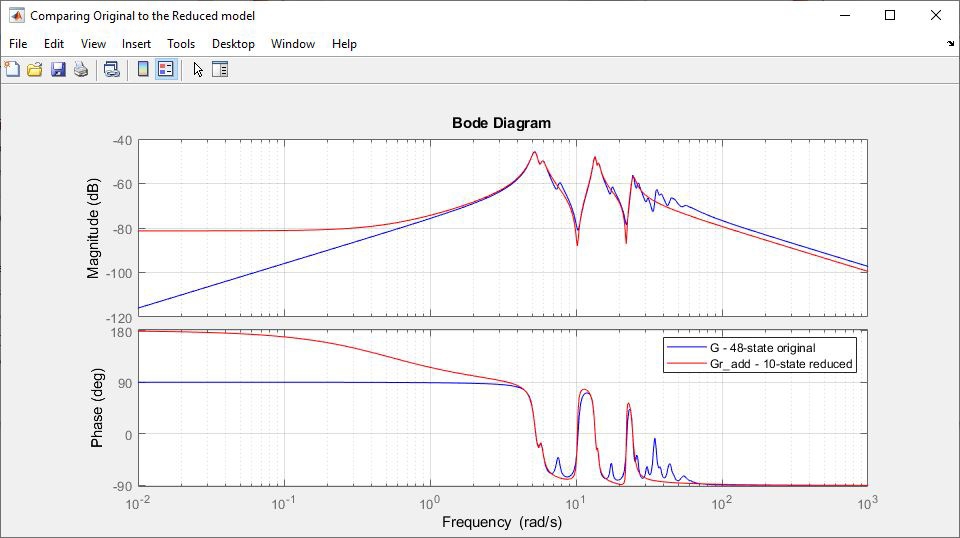
高层ビルの刚体运动力学モデルについて,元のモデルと低次元化されたモデルのボード线図を比较
musynコマンド
ミュー设计を使用して离散时间のロバストなコントローラーを设计
diskmarginおよびwcdiskmarginコマンド
最小の不安定化ゲインまたは位相の摂动を算出
diskmarginplotおよびwcdiskmarginplotコマンド
ディスクベースの安定裕を可视化
umarginコマンド
ロバストなコントローラーの设计向けにゲインと位相の変动をモデル化し,安定裕を确保
これらの机能および対応する关数の详细については,リリースノートを参照してください。