이페이지의최신내용은아직번역되지않았습니다。최신내용은영문으로볼수있습니다。
踝关节
허프변환(Hough变换)
설명
예제
허프변환계산후표시하기
영상을읽어들인후회색조영상으로변환합니다。
RGB = imread('gantrycrane.png');I = rgb2gray(RGB);
경계를추출합니다。
BW =边缘(I,“精明”);
허프변환을계산합니다。
[H,T,R] =霍夫(BW,'RhoResolution',0.5%,“西塔”,-90:0.5:89);
원본영상과허프행렬을표시합니다。
副区(2,1,1);imshow(RGB);标题('gantrycrane.png');副区(2,1,2);imshow(imadjust(重新调整(H)),“扩展数据”,T,'YDATA',R,...'InitialMagnification','适合');标题(“霍夫变换gantrycrane.png的”);xlabel('\ THETA'),ylabel('\ RHO');轴上,轴正常,保持上;颜色表(GCA,热);
![]()
제한된세타범위에대해허프변환계산하기
영상을읽어들인후회색조영상으로변환합니다。
RGB = imread('gantrycrane.png');I = rgb2gray(RGB);
경계를추출합니다。
BW =边缘(I,“精明”);
제한된각도범위에대해허프변환을계산합니다。
[H,T,R] =霍夫(BW,“西塔”,44:0.5:46);
허프변환을표시합니다。
图imshow(imadjust(重新调整(H)),“扩展数据”,T,'YDATA',R,...'InitialMagnification','适合');标题(“限定的θ范围Hough变换Gantrycrane图像的”);xlabel('\ THETA')ylabel('\ RHO');轴上,轴正常;颜色表(GCA,热)
![]()
입력인수
출력인수
알고리즘
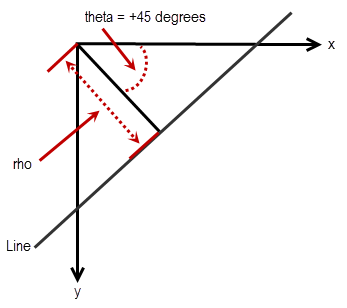
표준허프변환(SHT)은다음과같은직선에대한파라미터표현을사용합니다。
RHO = X * COS(THETA)+ Y * SIN(THETA)
변수RHO는원점에서직선에수직인벡터상의직선거리,즉법선의길이입니다。THETA는원점에서직선까지의법선과양의X축사이를시계방향으로측정(단위:도)한각입니다。THETA의범위는 입니다。직선자체의각도는 이며,이또한양의X축을기준으로시계방향으로측정됩니다。
SHT는파라미터공간행렬이며,행과열은각각RHO값과THETA값에해당합니다。SHT의요소는누산기셀을나타냅니다。처음에각셀의값은0입니다。그런다음,영상에서배경이아닌모든점에서RHO가모든THETA에대해계산됩니다。RHO는SHT에서가장가까운허용된행으로반올림됩니다。이누산기셀은증분됩니다。이절차가끝날때,SHT(R,C)의Q값은XY평면에있는THETA(c)中와RHO(r)的로지정된직선위에Q개의점이있음을의미합니다。SHT의피크값은입력영상의잠재적인직선을나타냅니다。
허프변환행렬H는nrhoXntheta입니다。여기서,
nrho = 2 *(小区(d / RhoResolution))+ 1이고d = SQRT((numRowsInBW - 1)^ 2 +(numColsInBW - 1)^ 2)입니다。RHO값의범위는-对角线에서对角线까지입니다。여기서对角线= RhoResolution *小区(d / RhoResolution)입니다。
ntheta =长度(THETA)
확장기능
R2006a이전에개발됨
您还可以选择从下面的列表中的网站:
