在这个视频中,我将介绍状态空间方程,首选现代控制的模型表示。然而,在我们开始之前,快速的警告:我们不打算进入深度上的状态空间数学。这段视频后,你可能不会是能写出来的方程任意系统。但是,我想你会得到的是这些方程,它可以是你可以建立在你了解了基础的良好直观的了解。最起码,它可能清理你可能有一些挥之不去的问题。因此,考虑到这一点,让我们开始吧。我是布莱恩,欢迎到MATLAB技术讲座。
我想动态系统一个有趣的事情是,他们可以通过常微分方程来表示。这是因为他们有这个属性,系统如何在任何给定时间的变化是其当前状态的函数。
如果我们通过推导了弹簧质量系统拉链真正的快,你可以看到我们有一个微分方程结束。这里,变量p是位置,并且相对于所述第二导数的时间是加速度。方式的系统正在改变加速-是当前状态的功能,位置。如果这个动力系统与一些能初始化,将继续在自己的移动,因为状态的衍生物和国家本身之间的这种关系。想想通过拉伸弹簧和放手初始化这个系统。加速度变化速度,改变位置,然后改变加速,并且它会来回摆动,您无需添加任何外部输入。由于在这个系统中没有阻尼,能量是守恒的,这加速速度位置循环将永远继续下去。
对于任意的动力系统,如果我们看一下能量通过分析它的状态和它们的衍生物之间的关系如何变化,我们可以做出这样的事情了系统的稳定性要求。正在消散随着时间的能量?然后,系统稳定,速度更快的能量消耗,更稳定的它是。如果能量无限增长随着时间的推移,即使只是它的一部分,那么该系统作为一个整体是不稳定的。
稳定性是一个系统的简单地从该状态和它们的衍生物彼此连接的方式的固有特性。该系统的动作,但是,也可以通过外部能量的影响的方式被添加或随时间去除。这样的动态系统的衍生物均为当前状态的功能以及任何外部输入。
和状态空间是简单地高阶微分方程的重新包装成一组一阶微分方程,专注于这种关系。这种重新包装可以使系统更容易分析,因为我们可以看看互联系统以及如何系统由外部输入,甚至多个外部输入,这是非常强大的影响的基本行为。
也有很多的控制技术,是建立在状态空间模型,如卡尔曼滤波,LQR控制,鲁棒控制和模型预测控制,仅举几例。也有数值解的好处模拟当你的系统的状态空间模型,因为你首先建立衍生的载体,然后整合全矢量得到的状态。所以,这一切的一切,他们是相当真棒,值得学习。
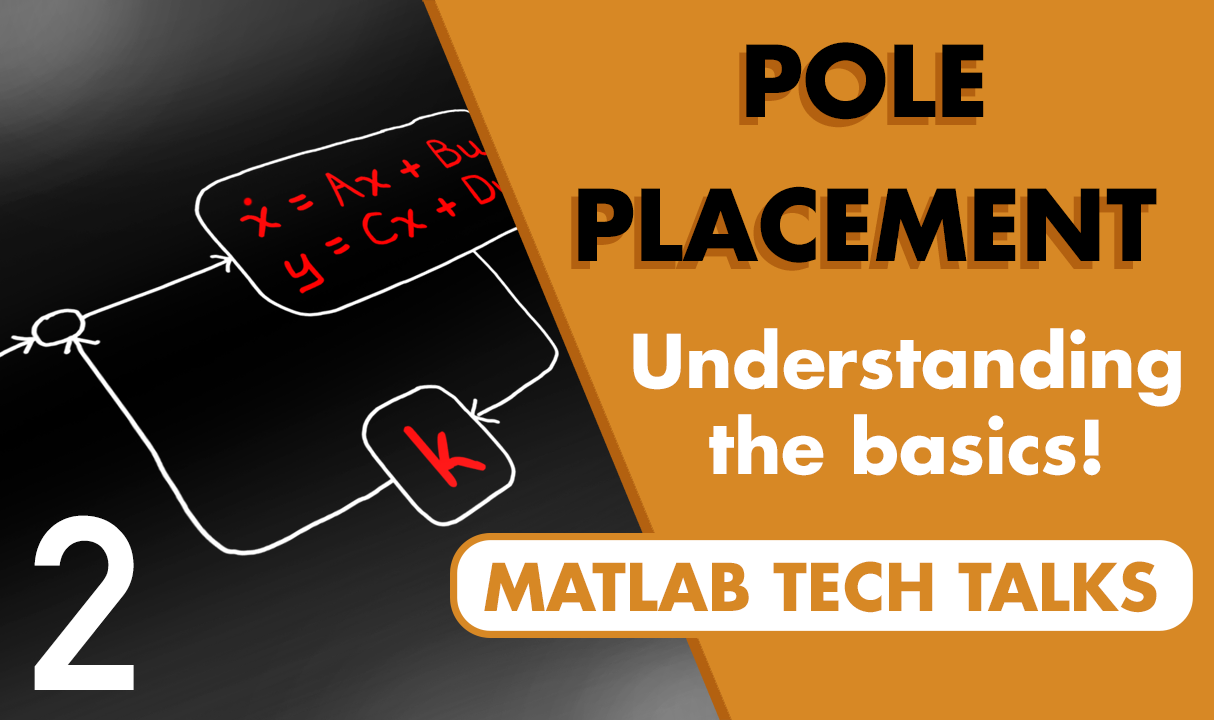
让我们花点时间来看看详细的状态空间方程,并设法使他们的意义不大。为此,我们将着重在连续表格上的线性时不变系统。有两个方程。第一个是状态方程,我们已经开发了周围一点点的直觉,而第二个公式是输出方程,我会在短短位。
状态空间是建立在状态向量x。这是所有的状态变量的向量。状态矢量的变化,或状态矢量的导数,如何是当前状态加的外部输入的线性组合的线性组合。
In this way, we’re not trying to look at the entire dynamics of the system end to end like we would with a high-order differential equation or a transfer function, but rather focus on the dynamics of each state variable and how those variables relate to each other.
如何做的第一状态改变为所有国家和所有的输入的功能?如何在第二个状态变化为所有状态和输入的函数?等等。而且因为我们永远只能看着每个状态的一阶导数,我们用一组一阶微分方程的结束。
我们现在留下的是线性方程组,我们可以打包成矩阵形式的系统。如果线性代数是好什么,它肯定求解线性方程组的系统。
正是这种重新包装成矩阵形式,让我们获得了大量的数学工具,我们以前是没有的。
状态方程的矩阵形式具有两个矩阵A和B的矩阵描述了内部状态如何都彼此连接,该系统的基本动力学;与B矩阵描述了输入如何进入系统,哪些国家是他们影响?
现在让我们看一下输出方程。Y是系统的,或者说你想知道的部分输出的载体。要认识到的重要一点是,产出不一定是状态变量。C矩阵描述了状态如何组合以获得输出,并且d矩阵被用于允许系统完全和前馈到输出端的输入,以旁路。
和在行动d矩阵的真正简单的例子是一个简单的乘法器,增益块的状态空间。输出等于输入时间的增益,所以在这样的A,B和C矩阵都是0,因为没有衍生物和无状态和d矩阵是增益的值。
当我们开始反馈输出,以制定我们的系统闭环控制输出方程的重要性将变得明显。但现在,这是不够了解公式的结构和反馈控制的下一个视频,我们将进入更深入的输出和状态方程之间的关系。
正如你可能已经注意到,状态变量是关键,整个事情。他们在三个地方出现了,这是代表,我认为是最难概念化的一部分。因此,了解它们是什么是非常重要的。状态变量是变量,充分说明了系统的最小集合。全面的描述意味着,我们必须对系统的变化部分,或可变部分足够的信息,我们可以预测系统的未来行为。
如果我们回到弹簧质量系统和苏斯什么状态变量是由没有关于系统的信息开始这样会更有意义。如果我画的春天和大众这样的,问你预测在什么地方,系统将会在一秒钟内,你需要什么样的信息?
Well, you’ll want the system constants like the spring constant and mass, and we’d want to know what the external force is that’s acting on the mass, so the inputs, but this only tells you part of the story because you don’t know what you might call the initial conditions for the variable parts of the system. If the mass is currently moving and how hard is the spring currently pulling on the mass. If we knew those two starting conditions, along with the system constants and inputs, then we’d be able to predict where the mass would be after one second.
因此,让我们考虑的第一个问题:是大众目前移动?我们会从大众的速度知道这一点,速度是可变的,因为质量会来回振荡,假设有在这个系统中的一些能量。我们需要为了预测未来的位置,所以我们可以说,这是一个状态变量速度;这是有必要的。
现在,让我们把初始弹簧力。力也是可变的,但让我们想想我们是如何得出会它。这是弹簧常数倍弹簧被拉伸的距离。因此,如果我们有一个距离,或质量相对于弹簧的拉伸长度的位置,那么我们就能够得到弹簧力。因此,我们要充分描述了该系统变量的最低数量是两个:位置和速度。而且,由于有两个,这是一个二阶系统。
因此,一个自然的问题现在可能是:为什么不更多的国家?为什么不是三个?
要回答这个问题,让我们考虑加速。这是一个变量,因为它与位置和速度一起改变。然而,我们并不需要知道加速全面描述系统;加速的作用在惯性力的结果,在这种情况下力是质量的位置的一个副产品。因此,我们通过位置得到加速和增加加速你的状态变量列表的额外信息。
一些初看起来似乎奇怪的是,如果我们增加一个阻尼器进入这个系统,我们不会增加该系统的订单,因为我们不需要任何额外的状态变量来解释这种额外的元素。从阻尼力是由质量,其中,再次,我们已经在我们的状态变量列表的速度决定。因此,这两个系统中具有相同数目的状态变量:二。
验证你一个方法必须描述一个系统所需的状态右侧的数字是计算电能存储装置,你的系统了。我不会,因为我觉得里克·希尔博士做了解释它在自己的YouTube视频,我在下面的描述中已经挂了伟大的工作进入太多细节在这里。但总的思路是这样的:以各种方式动态系统存储的能量。在我们的弹簧质量系统,有两种储能元件:春天,哪些商店势能和质量,这店动能。
该动力系统移动和改变自身仅仅是因为系统转让中存在的能量通过热量,最终失去了对环境的存储元件,并最终消散之间来回穿梭。在任何时候,如果我们知道有多少能量被储存在每一个元素,那么我们就知道它的状态,并有必要充分了解系统的状态信息。各州并不代表能量。他们只是需要确定的能量。
对于弹簧质量系统,我们知道从质量的速度质量的能量,我们知道在春天的能量从位置,或者从弹簧多远拉伸。如果我们知道那些能量是如何在系统,或者把它的另一种方式,每个国家如何吸收和失去基础上,目前国家能源内连接的系统,那么我们完全理解系统本身。
这本质上是什么状态空间做我们。综观状态变量-如何能量被存储和根据能量是如何状态之间转移组合它们,并从外部源中的任何额外的能量增加。
与希尔教授介绍了一些特殊的注意事项,这就是为什么在你的系统储能元件的数量等于状态的数量。因此,我们的弹簧 - 质量 - 阻尼器是二阶系统依然,因为阻尼器不会存储能量;它只是向外发散。
于是我们知道,规律是两个,但是为什么不能两种不同的状态?为什么位置和速度?那么,他们没有要。这就是事情可能会变得有些混乱。状态变量,位置和速度,可以被看作是状态空间内的坐标系。走在第五位的单位和三个速度单位。这点在状态空间是系统的当前状态,并且状态矢量描述该位置。
但是,我们可以与任何两个线性无关变量的状态空间描述这个位置。一些任意状态1和状态2,我们会拥有相同的系统状态,相同的总能量,只是使用不同的坐标。
我们做这个重新定义状态变量的所有状态空间的时间。这是我们正在做的事情,例如,当我们对角化的矩阵得到它进入所谓的模态形式。这两款车型代表了完全一样的系统,我们只是选择一组不同的坐标,一个不同的基础上,我们的状态向量。所以状态向量x是由位置和速度,以及状态矢量z向上由两个模态的状态,并且这些特定状态改变如刚才本身的函数。也就是说,一个国家不依赖于国家2的电流值,反之亦然。如果我们能够直接模式的形式写出来的状态空间,那么也许我们会。有没有什么特别有关其他状态变量比他们的数量,使直观的感觉来我们的位置和速度。
然而,由于国家不再定义为位置和速度,需要的,如果我们想保持系统的输出作为位置和速度改变以及C矩阵。通过这种方式,我们可以看到输出方程的利益。我们不完全是被迫的输出状态,我们定义它们,而是具有线性它们组合成变数,我们感兴趣的能力。
好吧,这就是我要离开这个视频了。我希望这有助于你想想在一个稍微不同的方式状态空间方程。而不是他们的思维为一组重新打包模式进入任意一阶微分方程矩阵,我们可以想想他们为每个状态变量分别写出动态。而动态是绑能量是如何存储和系统内传输。通过这样做,我们得到的是能够理解这些内部状态如何变化和相互关系,怎么能走动的利益,我们得到使用功能强大的工具,线性代数,分析和求解方程。
MATLAB和Simu万博1manbetxlink是巨大的环境与状态空间系统的工作。您可以使用多种内置工具转换为状态空间从一个传递函数,操纵矩阵,模拟它们,设计和分析控制系统。我将使用MATLAB来证明与状态空间方程,这个系列的其他控制技术。如果你不熟悉MATLAB使用状态空间,或者如果你正在寻找一个快速复习,我挂在那些值得一看的描述几部影片。在本系列的下一部影片,我将使用状态空间经过简单的反馈控制系统的设计。