控制系统工具箱
제어시스템설계및분석
控制系统工具箱™는선형제어시스템의체계적인분석,설계,튜닝을위한알고리즘및앱을제공합니다。시스템을전달함수,상태공간,영점 - 극점 - 게인또는주파수응답모델로지정할수있습니다。스텝응답플롯및보드플롯과같은앱및함수를통해시스템동작을시간도메인과주파수도메인에서분석및시각화할수있습니다。
보드루프및근궤적법등의대화형기술을사용하여보상기파라미터를튜닝할수있습니다。이툴박스는PID제어기를포함해SISO및MIMO보상기를모두자동으로튜닝합니다。보상기에는여러피드백루프를아우르는튜닝가능한여러블록이포함될수있습니다。게인스케쥴링제어기를튜닝할수있고레퍼런스추적,외란제거및안정성여유등의다양한튜닝목표를지정할수있습니다。상승시간,오버슈트,정착시간,이득및위상여유,기타요구사항을확인하여설계를검증할수있습니다。
시작하기:

전달함수및상태공간모델
전달함수또는상태공간표현을사용하여선형시불변시스템모델을만들고,PID제어기와주파수응답데이터를조작하고,输出또는MIMO시스템,연속또는이산시스템을모델링하고,기본모델을직렬,병렬또는피드백으로연결하여복잡한블록다이어그램을빌드할수있습니다。

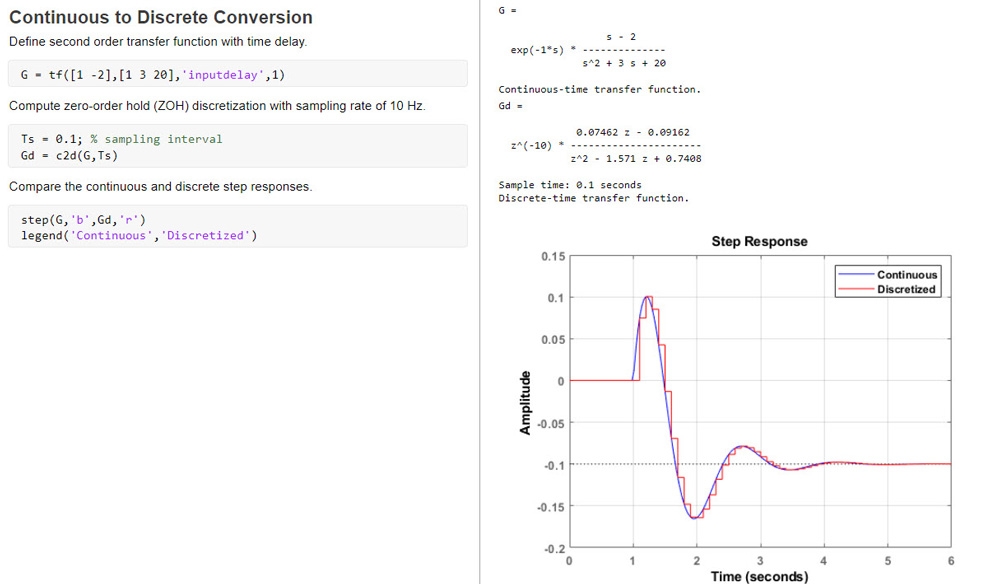
모델이산화
명령어함수또는상호라이브편집기작업을사용하여동적시스템모델을리샘플링하고연속시간도메인과이산시간도메인간에모델을변환합니다영차수유지(零),쌍선형(Tustin)영점——극점매칭및기타레이트변환방법을사용할수있습니다。
| 갤러리탐색(이미지2개) |
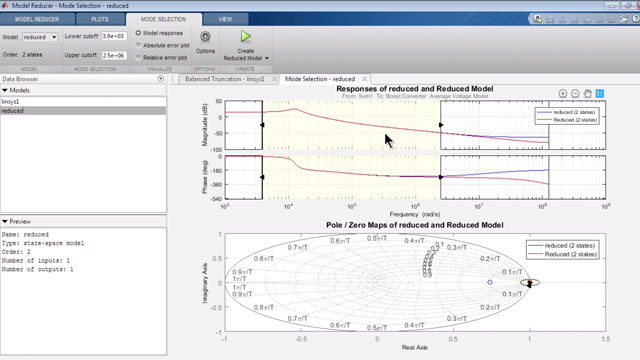
모델축소
型号减速앱,라이브편집기작업또는명령어함수를사용하여해당분야에서중요한역학을유지하면서플랜트또는제어기모델차수를대화형방식으로줄일수있습니다균형절삭,극점 - 영점단순화또는모드선택기법을사용할수있습니다。
시간및주파수도메인분석
선형시스템분석기앱에서스텝응답,임펄스응답,보드,니콜스,나이퀴스트,특이값및영/극점플롯을사용하여여러모델에서시간및주파수응답을살펴보고비교할수있습니다。상승시간,정착시간,최대오버슈트등의특성을조사할수있습니다。

안정성분석
이득여유,위상여유및교착주파수를계산하고,동적시스템의극점및영점위치를그래픽과수치를통해살펴보고,선형모델극점의감쇠비,고유진동수및시정수를계산할수있습니다。

이득여유,위상여유및교착주파수의계산。

| 갤러리탐색(이미지2개) |
PID튜닝
PID调谐器앱,라이브편집기작업또는명령어함수로PID제어기이득을자동으로튜닝하여성능과견고성사이의균형을맞추고원하는응답시간및위상여유와같은튜닝파라미터를지정하고,연속또는이산PID제어기를튜닝할수있습니다。

플랜트다이나믹스의대화형추정
PID调节器앱에서곧바로系统辨识工具箱™를사용하여,측정된입출력데이터로부터플랜트모델을만들수있습니다。또는라이브편집기를사용하여플랜트다이나믹스를확인하고PID제어기를튜닝합니다

二自由度PID제어
2자유도(2- DOF)PID제어기를튜닝하고,1-自由度PID제어기대신2自由度PID제어기를사용하여설정값추적의유의미한오버슈트증가없이더나은외란제거를달성할수있습니다。

二自由度PID제어기(실선)를튜닝하고PID调谐器앱에서이를1-DOF PID제어기(파선)와비교하기。
근궤적및보드다이어그램을사용한대화형설계
控制系统设计师앱을사용하여输出제어시스템을대화형방식으로설계및분석하고,근궤적,보드다이어그램,니콜스차트를사용하여PID,진상/지상네트워크및노치필터등의일반적인제어구성요소를그래픽방식으로튜닝할수있습니다。

폐루프응답모니터링
스텝응답,나이퀴스트를비롯해제어기를튜닝함에따라동적으로업데이트되는기타플롯을사용하여폐루프및개루프응답을시각화하고,상승시간,최대오버슈트,이득여유,위상여유와같은시간도메인및주파수도메인설계요구사항을지정및평가할수있습니다。

다중루프설계
여러개의输出루프로구성된제어기를튜닝하고,输出루프를순차적으로닫고,루프상호작용을시각화하며,최적의전체성능을위해각루프를반복적으로튜닝할수있습니다。

| 갤러리탐색(이미지3개) |
输出및MIMO루프
控制系统调谐器앱또는명령어함수를사용하여이득,PID제어기또는저차필터와같이튜닝가능한단순한요소로输出또는MIMO제어시스템아키텍처를모델링및튜닝하고,다중루프제어시스템에서여러개의루프를공동으로튜닝할수있습니다。

시간및주파수도메인목표
추적성능,외란제거,잡음증폭,폐루프극위치및안정성여유등의튜닝요구사항을지정및시각화하고,필수요구사항(설계제약조건)을충족하고남은요구사항(목표)을가장잘충족시킬수있도록제어기파라미터를자동으로튜닝할수있습니다。

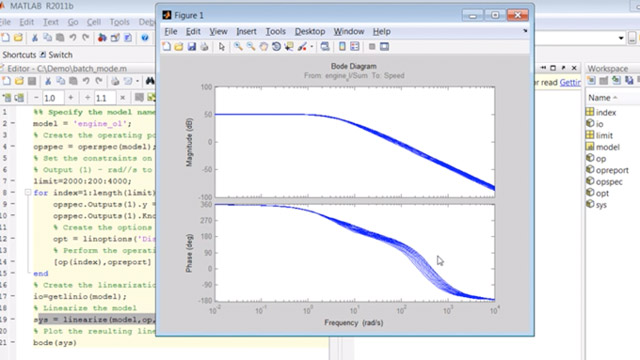
일련의플랜트모델을기준으로튜닝
파라미터변화,동작점의변화,센서또는액추에이터결함으로인한플랜트다이나믹스의변경에대해견고한제어기를설계할수있습니다。

플랜트파라미터변화에대해강인한제어기설계하기。
万博1manbetx仿真软件의게인스케줄링제어기
万博1manbetx®에서가변PID제어기,가변전달함수,가변노치필터,가변저역통과필터와같은블록을사용하여게인스케줄링제어시스템을모델링할수있습니다。

万博1manbetx仿真软件에서이득스케줄링된제어기를모델링하기위한라이브러리。
게인곡면튜닝
게인곡면계수를자동으로튜닝하여시스템의운용영역선도전체에서성능요구사항을충족하고동작점간의원활한천이를달성할수있습니다。작동조건에따라변하는요구사항을지정하고,설계의전체작동범위에대해튜닝결과를검증할수있습니다。

等/ LQG및극배치
연속및이산LQR(线性二次型调节器)및LQG(线性二次高斯)제어기를설계하고,피드백이득행렬을계산하여원하는위치에폐루프극점을배치할수있습니다。

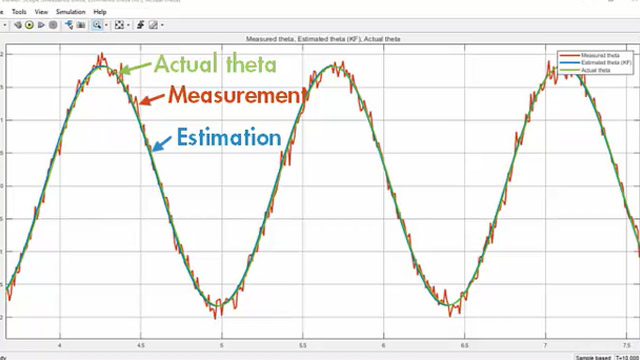
칼만필터
선형정상상태및시변칼만필터를설계및시뮬레이션하고,MATLAB编码器™및Simulink的编码器™를사万博1manbetx용하여이러한필터의C / C ++코드를생성할수있습니다。
비선형상태추정기
MATLAB®과仿万博1manbetx真软件에서확장형칼만필터,무향칼만필터또는입자필터를사용하여비선형시스템의상태를추정하고,MATLAB编码器및仿真软件编码器를사용하여이러한필터의C / c++코드를생성할수있습니다。
선형분석
万博1manbetxSimulink的控制设计™의선형분석툴을사용하여Simulink的모델을선형화하고,선형화된모델의시간및주파수응답을스텝응답,임펄스응답,보드,니콜스,나이퀴스트,특이값및영/극점플롯을사용하여계산할수있습니다。
보상기설계
万博1manbetxSimulink的에서모델링된SISO피드백루프를Simulink的控制设计을사용하여그래픽방식으로튜닝하고,대화형보드,근궤적및니콜스그래픽편집기로제어기극점,영점및이득을추가,수정및제거하여제어기를설계할수있습니다。

