rectifyStereoImages
纠正对立体图像
语法
描述
(undistorts和调整的版本j - 1,J2,reprojectionMatrix)= rectifyStereoImages (I1,I2,stereoParams)I1和I2输入图像使用的立体参数存储在立体相机系统stereoParams对象。使用reconstructScene函数与reprojectionMatrixreproject二维点的差异映射到一个3 d点纠正相机相机1的坐标系统。
立体形象整改项目图片到一个通用的图像平面的方式对应的坐标点有相同的行。这幅图像投影使图像看起来好像两个摄像头是平行的。使用disparityBM或disparitySGM函数来计算视差地图纠正图像的三维场景重建。
(___,返回3×4摄像机投影矩阵camMatrix1,camMatrix2,R1,R2)= rectifyStereoImages (I1,I2,stereoParams)camMatrix1和camMatrix2纠正相机,和相应的整改旋转矩阵,R1和R2。
例子
纠正立体影像
指定图像包含棋盘校准。
imageDir = fullfile (toolboxdir (“愿景”),“visiondata”,…“校准”,“立体”);leftImages = imageDatastore (fullfile (imageDir“左”));rightImages = imageDatastore (fullfile (imageDir“对”));
检测棋盘格。
[imagePoints, boardSize] = detectCheckerboardPoints (…leftImages.Files rightImages.Files);
指定棋盘要点的世界坐标。
squareSizeInMillimeters = 108;worldPoints = generateCheckerboardPoints (boardSize squareSizeInMillimeters);
读取图像。
I1 = readimage (leftImages, 1);I2 = readimage (rightImages, 1);图象尺寸= [(I1, 1),大小(I1, 2)];
校准立体相机系统。
stereoParams = estimateCameraParameters (imagePoints worldPoints,图象尺寸=图象尺寸);
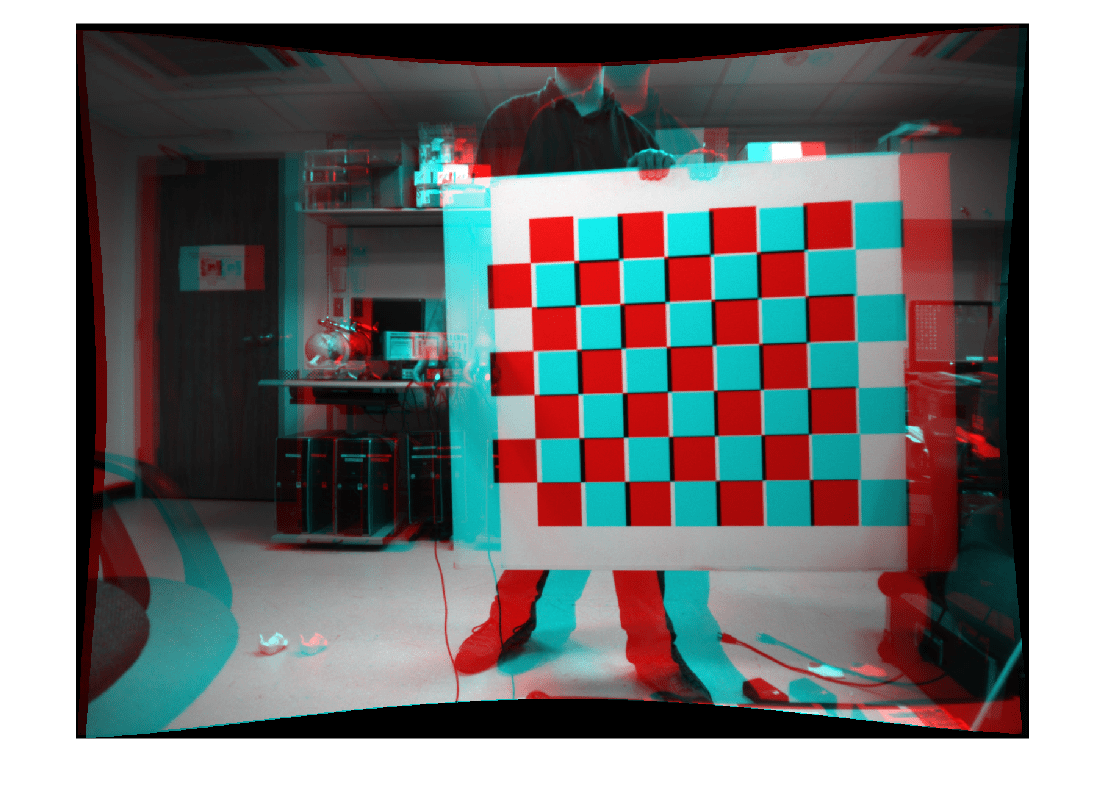
纠正图像使用完整的输出视图。
[J1_full, J2_full] = rectifyStereoImages (I1、I2 stereoParams OutputView =“全部”);
显示结果为“全部”输出视图。
图;imshow (stereoAnaglyph (J1_full J2_full));
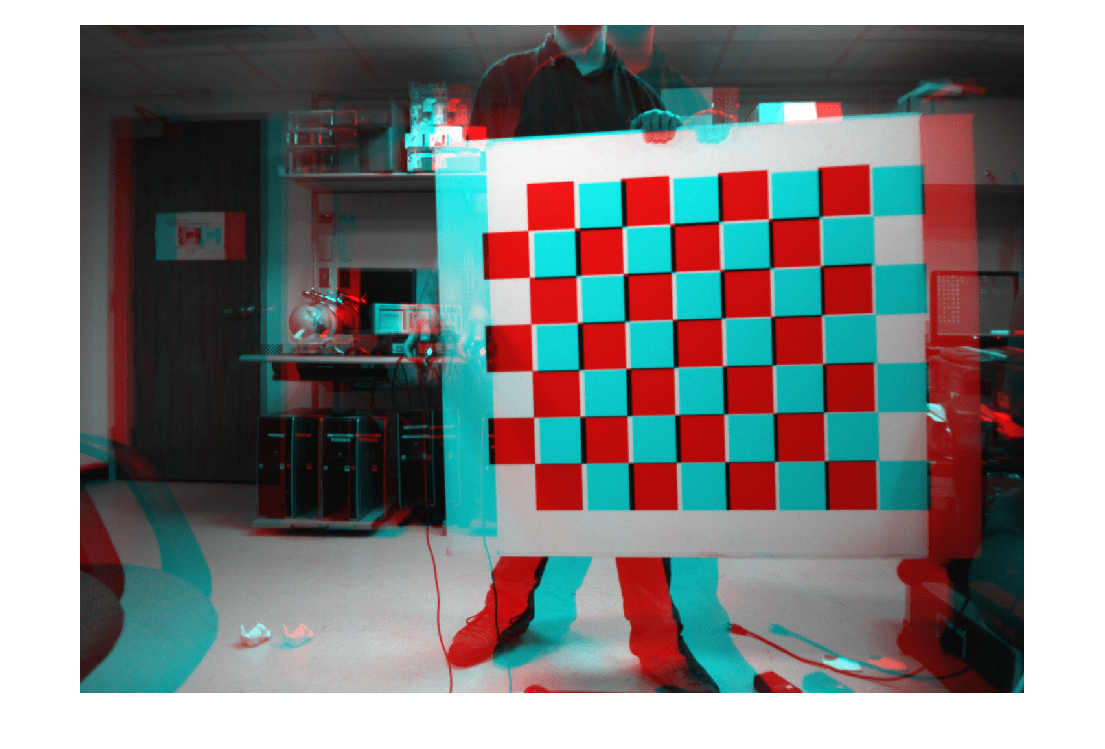
纠正图像使用的有效输出视图。这是最适合计算差异。
[J1_valid, J2_valid] = rectifyStereoImages (I1、I2 stereoParams OutputView =“有效”);
显示结果为“有效”输出视图。
图;imshow (stereoAnaglyph (J1_valid J2_valid));
输入参数
输出参数
提示
计算机视觉工具箱™矫正算法要求每个图像的核点之外的形象。如果核点在图像,你可以首先将图像转换为极坐标描述精馏方法提出的马克•Pollefeys Reinhard科赫,吕克·范干傻事[2]。
引用
[1]Bradski和a . Kaehler学习OpenCV: OpenCV的计算机视觉库。塞瓦斯托波尔,CA: O ' reilly, 2008年。