电机控制块集
Diseñee Impliente Algoritmos de Sistemas de Control de摩托斯
电机控制BlockSet™Proporciona Bloques de Simulink万博1manbetx®我们需要一种控制东方campo的算法和其他一些在escobillas的机器的算法。这些组织包括“转变公园和克拉克”、“感知罪恶的观察者”、“行动的参加者”、“空间的参加者”和“东方行动的参加者”automático。控制算法可以验证电机和逆变器的模型包括在模块集中。
普罗旺斯-普拉巴斯-普鲁巴斯-普鲁巴斯-普鲁巴斯-普鲁巴斯-普鲁巴斯-普雷巴斯。n拉佐·塞拉多·帕拉齐扎·厄尔尼诺·德尔·控制研究所。
参考性电子表格验证了参考性电子表格和通用电子表格的控制算法,以确保电子表格在生产过程中的实施。参考性电子表格中的实用性电子表格是汽车硬件控制套件的一部分兼容CONEL区块集。
MásfiginaCión:

Simulación y generación de código
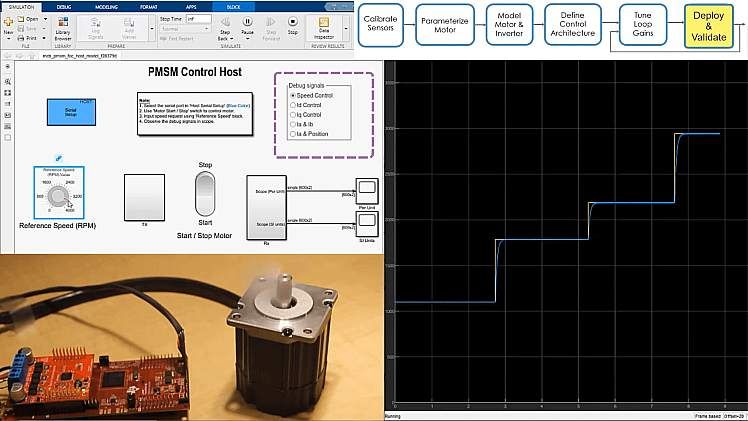
蒙塔多斯科摩普托综合参考方案的效用,用于实现蒙塔杰市内部和上层建筑永久电机控制系统(PMSM)的算法,以及用于城市交通的感应电机(BLDC)在拉佐·塞拉多的模拟算法中,对概率模型和验证模型的利用率,以及对mismos模型的一般性和有效性的再利用。

电机控制系统套件
在参考通用rápidamente código c Compact y rápido的基础上,允许实现电机控制系统的算法,以及各种电机控制系统的硬件套件。实现自动化的信条和要求在电机硬件中模拟准概率算法。在设备主机上实现目标和控制。万博1manbetx

Diseñodealgoritmosde Sistemas de Control
克拉克,控制者PI,将军席,帕尔马达马达,MTPA,对电机感应控制系统的性能和速度进行了评估。电机感应控制系统的实用程序BLDC。万博1manbetx

WeneracióndeCódigo
通用código en punto flotante o punto fijo rápido和compacto para su implementationón en Microcontroller or embebido(嵌入式编码器)。评估lazo的实际性能。

探索LaGalería(2Mágenes)
控制系统协议
Pruebe Algoritmos de Sistemas De Control en Tiempo Real ConI万博1manbetxnk Real-Time y El Kit de Sistemas de Control deMoteleleseléctricosde speedgoat。EL Kit Consta De UN PAIQUETE DE软件/硬件PARA ejecutar Y Probar Algoritmos de Sistemas De Control De CC Sin Escobillas DesArrollados Con Motel Control Sloct Gen Tiempo Real Utilizando E / SAnalógicasy Digitees。

成套系统的控制电机eléctricos的Speedgoat。
Decodificodes de Sensores.
我们可以根据我们的感官来确定我们的标准,也可以根据我们的法典来确定。A continuación, utilice bloques de decodificadores de sensors para procesar señales de sensors Hall, codificadores de cuadratura y resolvers para calculator posición y la la velocidad del rotor。

LibreríadeDododificoResde Sensores EN电机控制块集。
传媒系
Impliete Un Sistema De Contin de Campo Oriendo Sin Sensores ultizando LOS Bloques滑动模式观察器Y磁通观测器。利用estos bloques para calcular laPosiciónEleéctrricadel转子Y La VelocidadMecánicade los pmsm y de los motores deInducciónaperirde las rensiones y de las corrientes medidas。estime el flujomagnéticoy el par motormecánico。ajuste losparámetrosdel abservador y resifique su funcionamiento en unasimulaciónantes de Wenerarcódigoembebido。

Estimación de posición y velocidad Utizando el bloque滑模观测器。
一种独特的控制崇拜
计算automáticamente las ganancias iniciales在控制器上的速度为对应的función de los parámetros电机和逆变器。我们的脚本是比例的,我们的分析是dinámica实际的,我们的时间是计算的,我们的代表是geométrico las raíces,我们的图解是escalón实际的(控制系统工具箱)。

Pruebas de Las Ganancias del Controlador Calculadas en El Hardware Del Motor。
磁场定向控制自动调谐装置
利用EL Bloque Fielded Control AutoTuner Para Ajustar Las Ganancias de Lazo de Corriente Y Velocidad de Los Controladores de Campo Oriendo Para Lograr El Ancho de Banda Y El Margen de Fase Elecomados Para Cada Lazo(Con Simulink Control De万博1manbetxsign)。Ajuste Las Ganancias en LaSimulaciónConeaActiono A Un Modelo de Planta。TambiénPuedeAjustar Las Ganancias en Tiempo真实Con Ad Al硬件Del Accionador del Motel Utilizando Una Platraforma de硬件Speedgeat(Con Simulink实时)。万博1manbetx

pruebas interneradasprediseñadas.
识别estátor的电阻,识别eje d和eje q的电感,识别反向电流,识别parámetros de fricción电机的惯性,识别parámetros de fricción电机的惯性,识别ejecutan pruebas预先定义的电机的惯性。如果你能感知到霍尔,你就能感知到周围的一切。

电机和逆变器的模型
型号:inducción和PMSM的模拟电动机,外观上的内部利用,不能实现型号:parámetros集中线的电动机。参数的形式和价值决定了乐器的一部分。将控制器模型、电机模型和逆变器模型结合起来,以实现对拉佐塞拉多rápidas的模拟。

Modelado de UN PMSM Y联合国逆转。
Simscape电气有限公司阿尔塔菲德利达模型
模型模拟dinámica无直线电机y模型模拟conmutación理想的详细信息和逆变器利用Simscape电气™。我们的控制系统算法是关于一个电机和逆变器的模型的,我们可以模拟不包含conmutación的线性效应。

探索LaGalería(2Mágenes)