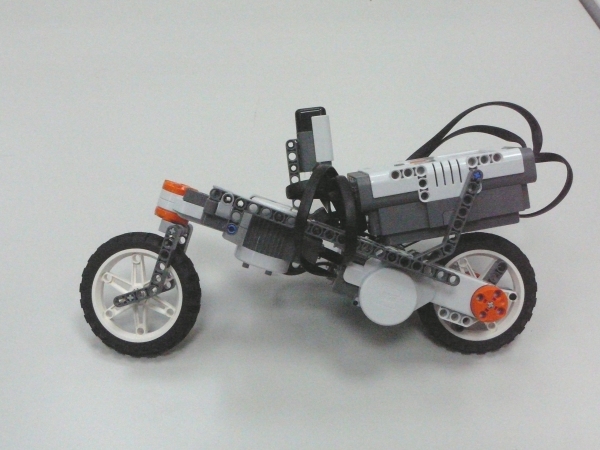
NXT自行车的陀螺传感器由nxtOSEK供电。
由代尔夫特理工大学的JTM Mutsaerts建造,
自行车动力学实验室,http://www.bicycle.tudelft.nl.
副教授Jo W. Spronck的作业。
使用与nxway - gs中相同的控制环境
还有转向的概念——进入秋天。
http://www.youtube.com/watch?v=o7nSQ2ycGX4
本演示使用嵌入式Coder Robot NXT demo作为MBD环境。在尝试此演示之前,您需要从以下URL下载它。
//www.tianjin-qmedu.com/matlabcentral/fileexchange/13399
<免责声明>
乐高(R)是乐高集团公司的商标,该公司没有赞助、授权或背书本演示。LEGO(R)和Mindstorms(R)是乐高集团的注册商标。
引用作为
•(2022)。NXTbike-GS(转向跌落式自平衡自行车机器人)(//www.tianjin-qmedu.com/matlabcentral/fileexchange/27694-nxtbike-gs-self-balancing-bike-robot-by-steer-into-fall), MATLAB中央文件交换。检索.
nxtway_gs /模型/
nxtway_gs /模型/
您也可以从以下列表中选择网站: