此应用程序是作为基于web的控制系统教程的一部分开发的,可从以下网站获得:http://ctms.engin.umich.edu
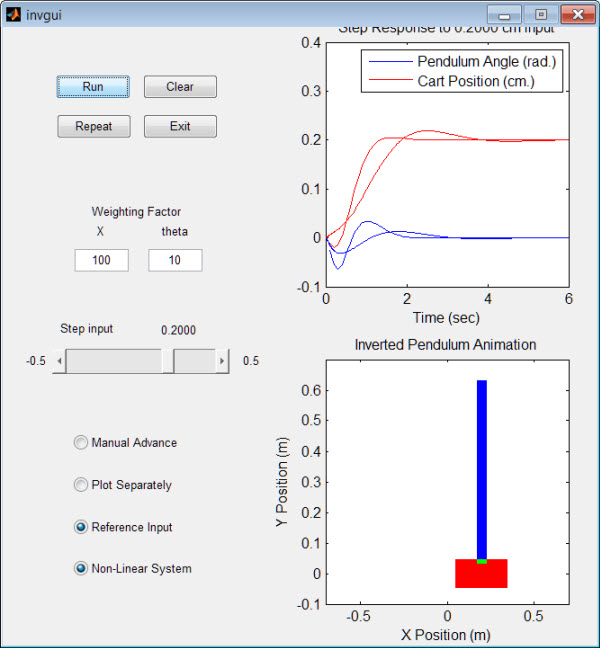
此应用程序的目的是允许用户通过阶跃响应图查看倒立摆系统的动画。这允许用户查看绘图和系统物理响应之间的相关性。
动画和应用程序基于教程的倒立摆-状态空间控制器设计页面:
http://ctms.engin.umich.edu/CTMS/index.php?example=InvertedPendulum§ion=ControlStateSpace
使用状态反馈方法是因为我们可以很容易地返回小车位置和摆锤角度以及它们各自的速度。有关系统模型的更多信息,请参阅教程的倒立摆-系统建模页面:
http://ctms.engin.umich.edu/CTMS/index.php?example=InvertedPendulum§ion=SystemModeling
引用为
里克·希尔(2021年)。倒立摆控制(//www.tianjin-qmedu.com/matlabcentral/fileexchange/40801-inverted-pendulum-control),MATLAB中央文件交换。恢复.
MATLAB版本兼容性
使用R2012b创建
与任何版本兼容
平台兼容性
窗户 马科斯 Linux标签
您还可以从以下列表中选择网站: