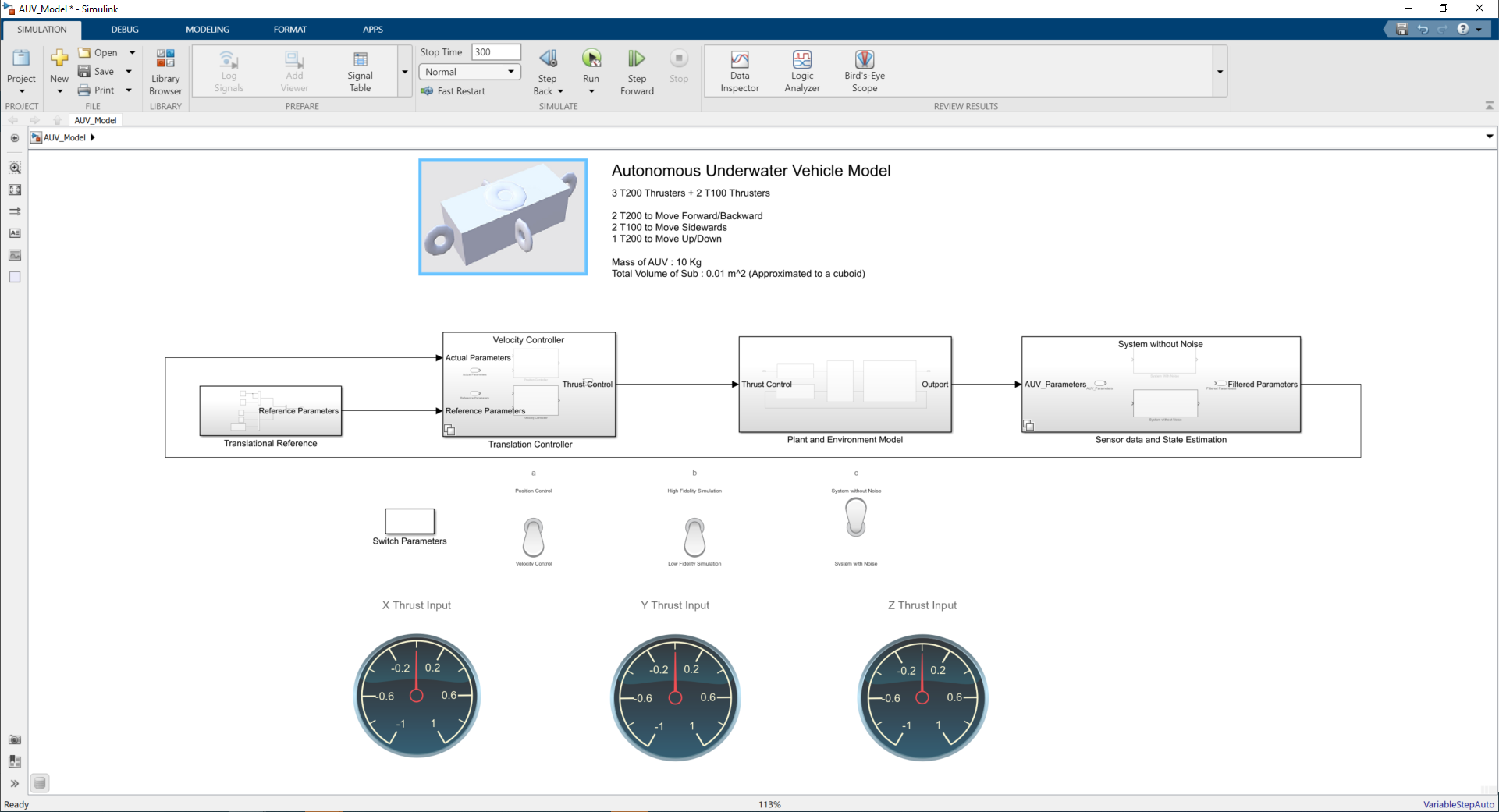
这个提交包含在这个视频中使用的文件建模,仿真和自动水下车辆的控制-//www.tianjin-qmedu.com/videos/modeling-and-simulation-of-an-autonomous-underwater-vehicle-1586937688878.html.这是一个六自由度自主水下航行器(AUV)和位置和速度控制器的模型。您可以根据您的应用程序需求在低保真度和高保真度传感器和环境模型之间进行切换。
航空航天模块用于对飞行器的动力学建模。要学习如何使用系统识别来建模推进器,请看这个视频-//www.tianjin-qmedu.com/videos/matlab-and-万博1manbetxsimulink-robotics-arena-from-data-to-model-1518156121608.html
文件:
AUVmodelingandsim。启动项目并适当地设置环境。
资源-项目资源
文件\ AUV_Model。slx - 万博1manbetxSimulink模型与AUV模型
文件\ setax。m - MATLAB辅助函数可视化AUV
联系人:
如有任何问题或建议,请写信至roboticsarena@mathworks.com
引用作为
MathWorks学生竞赛团队(2021年)。自主水下航行器的建模与仿真GitHub (https://github.com/mathworks/AUV-modeling-and-sim)。检索.
MATLAB版本兼容性
创建R2020a
与任何版本兼容
平台的兼容性
窗户 macOS Linux标签
文件
文件
要查看或报告这个GitHub插件中的问题,请访问GitHub库.
要查看或报告这个GitHub插件中的问题,请访问GitHub库.