文件交换
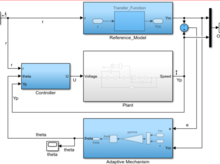
这个演示展示了如何设计、分析和优化模型参考自适应控制器(模型参考自适应)
示例使用一个非常简单的动态滑模控制系统。
应用程序的模型参考自适应控制(mra)状态反馈速度控制器(证监会)永磁同步电动机驱动器
动力系统的分岔分析。汽车分岔软件MATLAB的集成。
自调优监管机构(STR)
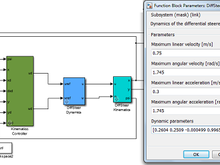
块微分带领(独轮车)移动机器人的仿真。控制器包括!
非线性反馈线性化的动力学应用于轮式移动机器人。
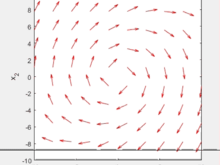
第二名和第三名的相图绘制的颂歌
一个新的群实数值优化问题的全局优化算法。
仿真万博1manbetx软件模型的双连杆平面手臂从自适应输出反馈Lee &哈利勒
计算比例因子矩阵和MEMS加速度计的偏差向量
这是一个非常好的和紧凑的文件生成1 d分岔图。
两个链接机械手的运动学和动力学模型进行非线性反馈线性化。
罚款GUI模拟3 rrr并联机械手逆运动学。手册和程序explainati
NLMS算法和自适应学习速率的演示。
自适应速度控制在永磁同步电动机驱动器使用算法不稳定的重复过程
小信号稳定
忘记的非常基本的重复补偿器是实现位置控制系统。
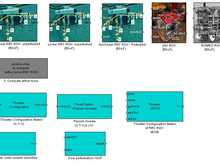
ROV控制系统设计和仿真工具
递归最小二乘法与指数遗忘
这个GUI可以模拟和规范一个非线性动态系统。
二阶模型参考自适应的例子
最近引入的代码优化策略,帝国主义竞争算法(ICA)。
配套软件
一种自适应方案用于输出系统状态和参数估计
模型参考自适应控制
为一阶系统控制器调整方法基于模型参考自适应的麻省理工学院的规则
Matlab函数确定一个非线性微分方程的阶跃响应系统
批处理最小二乘
李雅普诺夫稳定性使用muPad
控制lcd 16 x2覆盆子π在matlab raspi()函数。
代码殖民竞争算法(CCA)也被称为帝国主义竞争算法(ICA)
引导测试的非线性时间序列数据
工具,在Matlab / Simulink环境中自适应控制设计。万博1manbetx
一阶系统的调整(李雅普诺夫理论)
递归最小二乘法
投影算法
间接自校正调节器自适应控制中的应用。1度控制器
代数黎卡提微分方程解决方案通过C + Fortran仿真软件万博1manbetx
工具,在Matlab / Simulink环境中预测控制设计。万博1manbetx
另一个演示我的学生。
获得adiustment(李雅普诺夫理论)
控制器调整方法为二阶系统基于模型参考自适应的麻省理工学院的规则
这个例子说明了增益调整技术基于模型参考自适应的麻省理工学院的规则
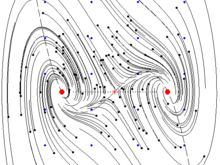
GUI,情节动力系统流场(以及更多)与滑块调整参数。
使用非线性控制器控制4-tank问题
一个演示程序使用variation-adaptive蚁群优化的图像边缘检测
情节可靠性图用于校准使用的预测和目标向量。
程序工具非线性控制系统的分析和合成基于MATLAB / Simulink 5.2万博1manbetx
并行优化工具箱对非线性模型预测控制(NMPC)
基于H∞混合灵敏度与MOPSO控制器自动加权选择。
MPsee工具箱是一个自动工具用于构建非线性模型预测控制器
非线性转换增益调度
坦克系统增益调度
一阶系统的调整(麻省理工学院规则)
非线性摆的能手
脚本计算和情节的增长率x + w * w * f (t) x = 0 w的函数。
基于被动自适应控制算法
视时自适应调节器
这个程序显示了通过电影阶段分岔
选择一个网站
选择一个网站翻译内容,看到当地事件和提供。根据你的位置,我们建议您选择:。
你也可以从下面的列表中选择一个网站:
选择中国网站(中文或英文)最佳站点的性能。其他MathWorks国家网站不优化的访问你的位置。
联系你当地的办公室