
MATLAB通信类和Simulin万博1manbetxk块Arduino单片机板

本课程是介绍建模与仿真(8章,90多个模型和脚本),MATLAB仿真软件,SImscape Stateflow万博1manbetx

幻灯片研讨会:“学习基本的机电一体化概念使用Arduino电路板和MATLAB”。

示例文件为MATLAB和Simulink仿真机器人领域步行万博1manbetx机器人视频。

Matlab的司机Thorlabs机动旋转阶段(PRM1Z8 K10CR1)

Simscape™语言机电例子定义一个简单的直流电机。

刷的数学模型

这个包代表了MATLAB安装免费的附加组件,NXP的基于模型的设计工具箱。

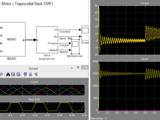
对三相电机空间矢量脉冲宽度调制

1点感应电动机的数学模型

速度变化是通过一个可变电阻串联与并联插入字段。反对增加

实现电枢电流输出为各种负载力矩和速度。
参考系的速度(w)可以选择作为用户的需求

计算推力的转子通过发送电机在不同占空比的命令


一个GUI控制六个伺服电机。
永磁同步电动机的数学模型

这种模拟是正确地工作直到2017年MATLAB和MATLAB的更高版本

ph值6即时通讯
实际设计和应用程序的模型预测控制,第9章

使用ActiveX控件来控制APT Thorlabs定位器

示范船的设计(面向领域的控制和矢量控制)刷永磁同步电动机通过使用MATLAB的产品s manbetx 845
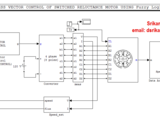
模糊逻辑控制SRM的直接转矩控制
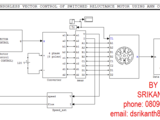
位置estimaiton srm(直接转矩控制)

基于模型的设计演示基于运动控制的案例研究

这是一个简单而强大的程序来驱动步进电机使用并行端口。

基本的数学建模和他励直流电机的闭环速度控制
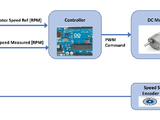
这个模型提出无刷直流电机速度控制。

直流电机的位置控制

比较在SRM不同控制器的性能
PI控制的感应电动机的速度控制
额外的I / O块MPC555目标——明确定位TPU的功能

这个提交包含一组模型显示的实现电动全地形车辆由无刷直流电机。
基于π的感应电动机的速度控制

无传感器SRM的速度控制

PID控制电机通用,脏污,IEEE y archivos xslx y CSV
速度控制的8/6使用简称anfis srm是更快的响应比传统的控制。

生成一个模型万博1manbetx®模型从Motor-CAD™文件。电机热罗融入Simscape™系统级模型。
直流电机模拟使用仿真软件Matlab(直流电机)万博1manbetx

该仿真软件万博1manbetx模型提出了一种整流器crirtical 1阶段的分析。加载包含RLE负载。

计算你的火箭的电机壳属性和一些输入。
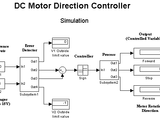
直流电机方向控制器simulatin显示一个小型直流电机的方向。

演示文件来陪相同名字的纸
模拟一个交流电动机驱动好奇的例子。
电池备份直流电机模型
感应电动机控制器使用基于Lyaponov非线性控制器
直流电机模型万博1manbetx

计算阻力(活性转矩)的转子通过发送电机在不同占空比的命令
看到电动机/发电机的稳定性模型
这个项目的目的是演示直流串激电动机的速度控制。