在这个视频中,我们将看到如何使用极值寻求控制来优化制动转矩的防抱死制动系统,减少停车距离。开始让我们看看防抱死制动系统是如何工作的概念。
在车辆,摩擦力作用于轮胎的周长与摩擦系数成正比。这个摩擦系数最大低零车轮滑转值和减少增加。在制动条件下,防抱死制动系统将试图最大化这个摩擦系数通过调整制动力矩保持理想的车轮滑转。这将有助于车辆控制停止,防止车轮锁。
在这个子系统,我们模拟车辆的制动特点防抱死制动系统。它接受一个值所需的车轮滑转,调节制动力矩实现车轮滑移。在子系统内部,我们可以想象车辆和车轮的速度以及车辆制动时的距离。
还模仿道路和轮胎表面之间的摩擦系数和总车轮滑转由这个表达式计算。首先,让我们考虑的情况下硬刹车防抱死制动系统的存在。这将导致车轮锁,车轮滑转成为一个意义。我们将诱导轮锁定设置所需的车轮滑转防抱死制动系统,这个常数块。
方案的仿真运行。在这里,你可以看到车轮角速度快速降低为零,这意味着轮开始滑在地上。车辆速度慢慢减少,大约需要180米,12秒的车辆停下来从一个初始速度约35米/秒。
现在让我们继续当启用了防抱死制动系统。我们将使用极值寻求控制找到所需的车轮滑转防抱死制动系统应实现最大化的摩擦系数特征,反过来,减少停车距离。我们将利用极值寻求控制块中引入仿真软件控制R2021a设计。万博1manbetx
此块创建一个模型免费实时自适应控制方法自动计算最优控制参数,一个静态或动态目标函数最大化。它追踪的最大目标函数的调制,否则扰动参数优化与正弦信号,解调产生的摄动目标函数,并更新整合解调信号的参数值。
对于这个示例,输入块将目标函数——即我们想最大化的摩擦系数。和输出将最优控制输入防抱死制动系统,也就是所需的车轮滑转。此块显示了控制器的框图设计,和让我们组的参数极值寻找控制器。
在参数中,我们将设置参数的数量被调整,因为我们只是调整所需的车轮滑转。现在我们需要提供一个良好的初始条件所需的车轮滑转,这样控制器可以收敛到一个最优值。我们将选择这个初始滑移是0.15。
调制和解调信号的频率,我们需要选择一个频率的频率低于重要的系统动力学。让我们把这个0.7弧度/秒。接下来,学习速率控制块可以滑动的速度参数。我们将增加到0.3。
现在的产品调制和解调信号随着学习速率,控制算法的收敛速度。对于大多数应用程序,比振幅调制解调幅度要大得多。所以对于这个应用程序,我们将分别设置为1和0.02。
接下来,让我们来指定阶段的调制和解调信号。对于这个应用程序,解调阶段,φ1,和调制阶段,φ2,设置为参数2和0。对于你的应用程序,设置φ1和φ2,cosφ1 -φ2是大于零的。
现在我们将使高通滤波器消除偏差信号的解调前摩擦系数目标函数。我们也可以使低通滤波器去除高频组件更新前滑的解调信号参数。我们将指定这些高和低通滤波器的截止频率是0.5和1弧度每秒。单击OK完成参数提高极值寻找控制器。
现在让我们重新运行模拟很难停止车辆的制动。整个制动事件,极值寻找控制器会找到所需的车轮滑转和最大化轮胎与路面之间的摩擦系数。这样的期望滑移的防抱死制动子系统调节制动转矩来实现这一滑。
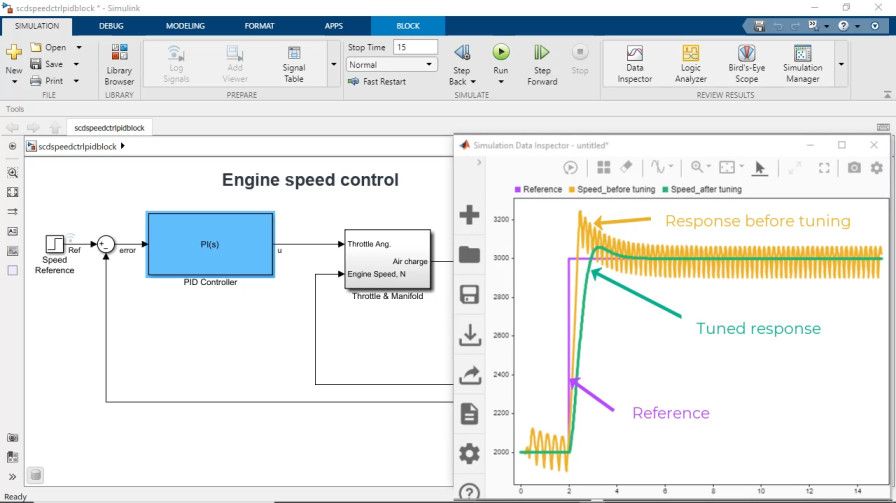
现在让我们比较摩擦系数的值目标函数和防抱死制动系统。这里我们看到极值寻求控制跟踪摩擦系数的最大特点为0.6。这带来了最大的减速和一个更短的停车距离110米在短短6秒,正如我们看到的,相对于场景防抱死制动是禁用的。
然后车花了180米,12秒停止。也与防抱死制动系统,方向盘角速度逐渐减少到0以及车辆速度,表明车轮没有锁定在突发事件。
所以综上所述,我们看到了如何使用极值寻找控制器一块优化防抱死制动系统的制动性能最大化的道路和轮胎表面之间的摩擦系数。此外,你也可以从这个块生成C或c++代码和部署到硬件,允许您测试和集成控制器设计或硬件。