万博1manbetxSimulink的控制设计
线性化模型和设计控制系统


基于模型的PID调优
使用PID调谐器应用程序自动线性化Simulink模型,并通过单击计算PID控制器块的增益。万博1manbetx通过调整带宽(响应速度)和相位裕度(鲁棒性)来满足设计要求,可以交互式地优化控制器性能。
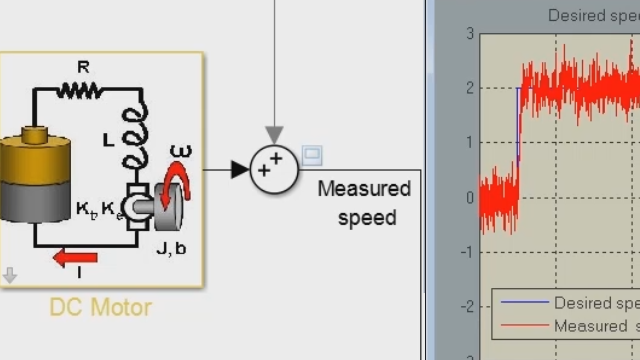
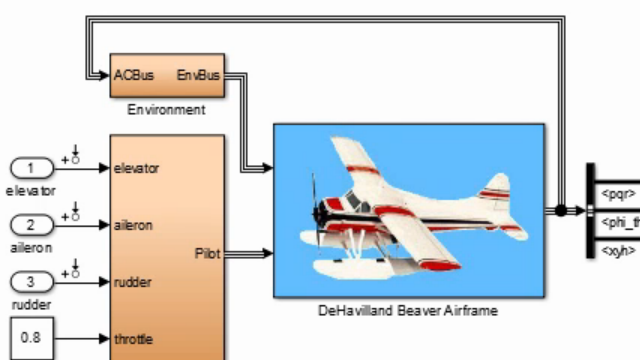
从模拟数据设备动态估计
对于Si万博1manbetxmulink模型不线性化由于不连续性,如脉冲宽度调制(PWM),使用PID调谐器应用创建从使用系统识别模拟输入 - 输出数据的线性模型植物(需要系统辨识工具箱™)。可替代地,基于工厂模型的估计频率响应自动地调谐PID控制器增益。
2自由度PID控制器整
appto自动调节使用PID调谐器2自由度PID控制器模块,以达到更好的抗干扰能力,而不在设定值跟踪过冲的显著上升。

调谐二自由度PID控制器在Simulink。万博1manbetx
PID自动调谐块
使用开环PID自动调谐块,根据开环实验实时估计的植物频率响应,自动调整PID增益。利用闭环PID自整定块来抑制非预期的工厂干扰,在估计实验中维护工厂的安全运行。您可以使用这些块来实现指定的带宽和相位裕度,而不需要参数化的植物模型。
部署
生成C代码来实现嵌入式软件中的调优算法,允许您在循环中使用或不使用Simulink进行调优(需要)万博1manbetx万博1manbetxSimulink的编码器™)。运行PID自整定算法,在工厂硬件上进行实时实验,自动计算PID控制器增益。
交互设计
通过使用增益,传递函数,状态空间,PID控制器和其它可调块模型在Simulink模型任意控万博1manbetx制结构。图形调谐离散或通过使用根轨迹图,Bode图,和Nichols图表连续环路。更新与调整收益万博1manbetxSimulink模型并利用仿真验证您的设计。
多回路的设计
使用多个SISO循环交互式地调整控制器,并在不修改Simulink模型的情况下指定循环开口。万博1manbetx在调优参数以优化整体性能时,可以可视化循环交互和耦合效果。

波德设计的多回路控制器
SISO和MIMO循环
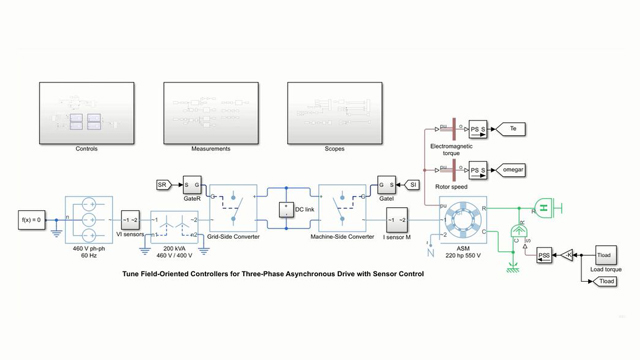
使用控制系统调优应用程序或命令行函数自动调整任意的SISO和MIMO控制结构。您可以使用简单的可调元素(如增益、PID控制器或低阶滤波器)来调优分散控制体系结构。您还可以在Simulink中联合调优一个多回路控制系统中的多个回路。万博1manbetx
时间和频率目标
指定和可视化调优需求,如参考跟踪目标、灵敏度目标、干扰抑制、闭环极点位置和稳定裕度。自动调整控制器参数以满足这些必须的需求(设计约束),并最好地满足其余的需求(目标)。
根据一组植物模型进行调优
跨越不同的操作点、参万博1manbetx数变化和故障条件对Simulink模型进行线性化,以创建一组线性工厂模型。然后,调整控制系统以满足所有这些工厂模型的性能目标。

建立带有参数的线性植物模型
批量线性化和修剪
在多种操作条件下自动修剪和线性化Simulink模型。万博1manbetx
增益调整面
利用变PID控制器、变传递函数、变陷波滤波器、变低通滤波器等Simulink块来建立模万博1manbetx型增益调度控制系统。超调增益表面系数,以满足整个系统运行包络线的性能要求,并实现运行点之间的平稳过渡。您可以指定随操作条件变化的需求,并在设计的整个操作范围内验证调优结果。

估计增益表面调谐
稳态分析
从用户定义的规范中计算操作点。您可以定义自定义的约束和裁剪目标。您还可以在模拟期间的特定时间或事件中生成操作点快照。

估计增益表面调谐
稳态经理
使用Steady State Manager应用程序从状态、输入和输出规范交互式地计算操作点。根据规范验证操作点,并从模拟快照中交互式地获取操作点。

在工作点Intialize模型
线性分析
线性化连续的、离散的和多速率Simulin万博1manbetxk模型。使用线性分析工具或命令行的功能,以指定环路和开口线性输入和输出。可以线性化整个模型,该模型的一部分,或单块或子系统。可视化步骤 - 响应曲线图或Bode图的结果和计算的开环和闭环反应。
跨操作点和参数变化的线性化
提取和分析模型的多个线性化;变化的参数值,操作点,I / O套;实现线性变参数(LPV)模型。
线性顾问
识别和修复使用线性顾问共同线性化的问题。你可以找到线性路径上块和指定的线性化行为分离块,如已线性化零块。

与线性化顾问诊断线性化问题
离线频率响应估计
使用线性分析工具或命令行函数来估计Simulink中建模的系统的频率响应,而不需要修改模型。万博1manbetx您可以:
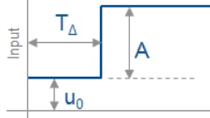
- 构建激励信号,如正弦扫频或线性调频脉冲信号。
- 模拟运行;收集数据;计算并绘制模型的频率响应。
- 研究了Simulink的频域特性,验证了Simulink模型的线性化。万博1manbetx
在线频率响应估计
测量系统运行时的频率响应。您可以将嵌入式估计算法部署为一个独立的应用程序,用于对物理设备进行实时估计。

频率响应估计块

从Simulink模型的频率响应创建参数模型万博1manbetx