柴油机MIMO控制
本例使用systune设计和调整用于柴油发动机的MIMO控制器。控制器在离散时间调整为一个单一的操作条件。
柴油机型号
现代柴油发动机使用可变几何涡轮增压器(VGT)和废气再循环(EGR),以减少排放量。该VGT增压和EGR质量流量是必须要满足严格的排放指标的严格控制。此示例示出了如何设计和调谐控制器MIMO当发动机在2100rpm以每注塑缸12毫克的燃料质量操作,调节这两个变量。
open_system('rct_diesel')

所述VGT / EGR控制系统在Simulink建模。万博1manbetx控制器调整位置EGRLIFT和VGTPOS的EGR和VGT阀。它可以访问的增压压力和EGR质量流量的目标和测量值,以及燃料质量和发动机速度的测量。两个阀门有率和饱和度限制。植物模型每0.1秒,并且控制信号采样EGRLIFT和VGTPOS是每0.2秒刷新一次。本实施例中考虑了增压压力和+3克/秒在EGR质量流10千帕的步骤的变化,和5毫克的燃料质量和-200转速度扰动。
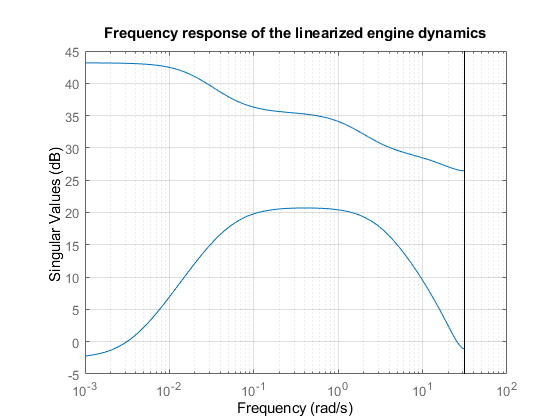
对于所考虑的操作条件中,我们使用系统识别来导出从实验数据发动机的线性模型。从操纵变量的频率响应EGRLIFT和VGTPOS以控制变量促进和EGR MF下面出现。请注意,该植物在低频率,这使得增压压力和EGR质量流量困难的独立控制病态的。
西格玛(植物(:,1:2)),网格标题(“线性化的发动机动力学的频率响应”)
控制目标
主要有两个控制目标:
响应步骤在增压压力和EGR质量流量改变约5秒以最小的交叉耦合
是不敏感的速度和燃料质量(小)的变化。
使用跟踪需求为第一目标。指定的步骤的变化的幅度,以确保交叉偶联是小相对的这些变化。
%5-第二响应时间,稳态误差小于5%TR = TuningGoal.Tracking({'BOOST REF';'EGRMF REF'},{'促进';'EGRMF'},5,0.05);TR.Name =“设定值跟踪”;TR.InputScaling = [10 3];
对于第二个目标,处理速度和燃料质量的变化作为步骤扰动并指定增压压力和EGR质量流得到的变化的峰值幅度和稳定时间。还指定了信号幅度,以正确反映每个扰动的相对贡献。
%峰值<0.5,沉降时间<5DR = TuningGoal.StepRejection({'FUELMASS';'速度'},{'促进';'EGRMF'},0.5,5);DR.Name =“抗扰”;DR.InputScaling = [5 200];DR.OutputScaling = [10 3];
以提供足够的坚固性,以未建模动态和混叠,限制控制带宽,并在植物的输入和输出都施加足够的稳定性裕度。因为我们正在处理的2×2的MIMO反馈回路,这个要求保证了在每个反馈信道增益或相位变化的稳定性。增益或相位可以在两个信道同时改变,并且在每个信道不同的量。看到在控制系统调优的稳定裕度和TuningGoal.Margins了解详情。
%滚降-20分贝/ DEC的过去1弧度/秒RO = TuningGoal.MaxLoopGain({'EGRLIFT','VGTPOS'},1,1);RO.LoopScaling =“关”;RO.Name ='滚下';%7增益裕量的dB和45度的相位裕量的M1 = TuningGoal.Margins({'EGRLIFT','VGTPOS'},7,45);M1.Name =“植物输入”;M2 = TuningGoal.Margins('柴油发动机',7,45);M2.Name =“工厂产出”;
黑箱MIMO控制器的调谐
如果没有适当的控制结构的先验知识,首先尝试各种顺序的“黑盒”状态空间控制器。工厂模式有四种状态,所以尽量的四阶以下的控制器。在这里,我们调整自Simulink模型的“SS2”块第二位控制有两种状态。万博1manbetx
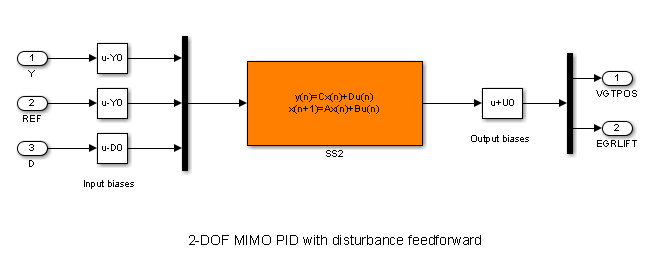
图1:二阶黑盒控制器。
使用slTuner界面来配置调谐Simulink模型。万博1manbetx标记块“SS2”为可调的,注册的位置,其中,以评估利润率和环的形状,并指定线性化和调谐应在控制器的采样率来进行。
ST0 = slTuner('rct_diesel','SS2');ST0.Ts = 0.2;addPoint(ST0,{'EGRLIFT','VGTPOS','柴油发动机'})
现在使用systune调整状态空间控制器受到我们的控制目标。对待稳定裕度和滚降目标作为硬约束,并尝试以最好地满足其余目标(软球)。随机起点,以减少暴露于不良的局部极小。
选择= systuneOptions('RandomStart',2);RNG(0),ST1 = systune(ST0,[TR DR],[M1 M2 RO],OPT);
决赛:软= 1.05,硬= 0.91476,迭代次数= 326决赛:软= 1.05,硬= 0.99904,迭代次数= 489决赛:软= 1.05,硬= 0.96413,迭代= 452
所有的要求都满足近(当它的标准化值小于1的要求得到满足)。验证此图形。
数字('位置'[10,10,1071,714])viewGoal([TR DR RO M1 M2],ST1)
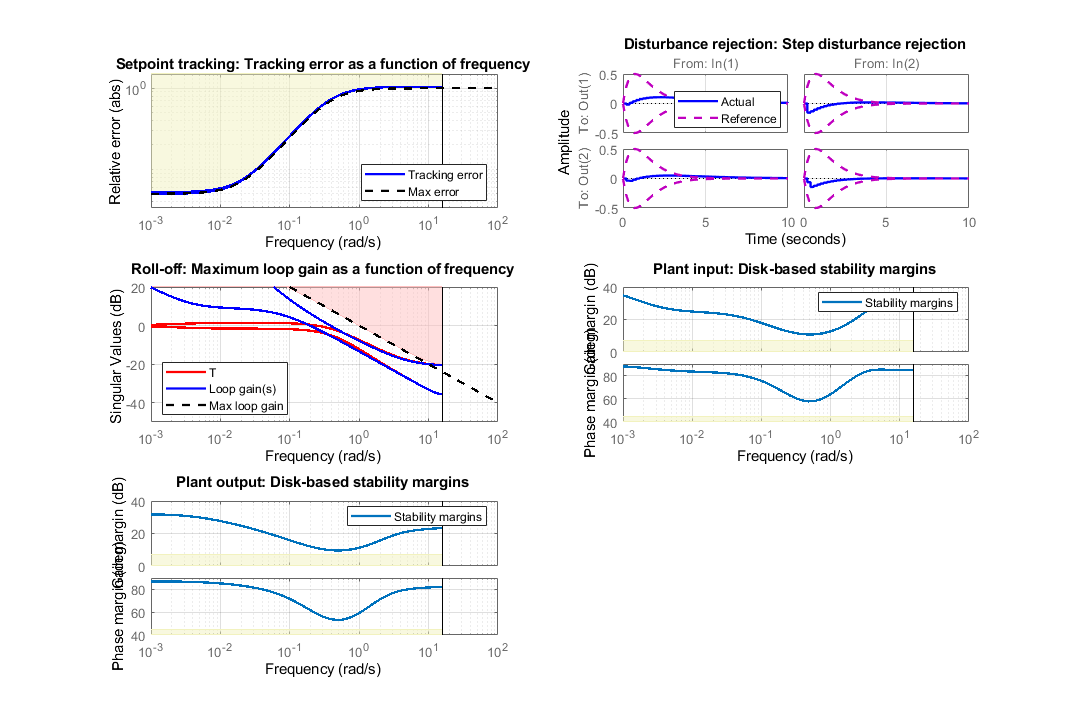
剧情设定值跟踪和干扰排斥反应。尺度由信号幅度(由10千帕,EGR质量流量+3克/秒,由5毫克的燃料质量和速度由-200转增压压力的变化),以显示归一化的效果。
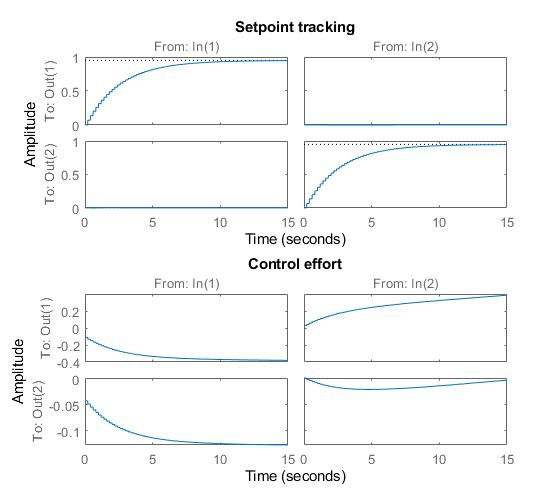
数字('位置',[100100560500])T1 = getIOTransfer(ST1,{'BOOST REF';'EGRMF REF'},{'促进','EGRMF','EGRLIFT','VGTPOS'});T1 = DIAG([1/10 1/3 1 1])* T1 * DIAG([10 3]);副区(211),步骤(T 1(1:2,:),15),标题(“设定值跟踪”)副区(212),步骤(T1(3:4,:),15),标题(“控制力”)
D1 = getIOTransfer(ST1,{'FUELMASS';'速度'},{'促进','EGRMF','EGRLIFT','VGTPOS'});D1 = DIAG([1/10 1/3 1 1])* D1 * DIAG([5 -200]);副区(211),步骤(D1(1:2,:),15),标题(“抗扰”)副区(212),步骤(D1(3:4,:),15),标题(“控制力”)
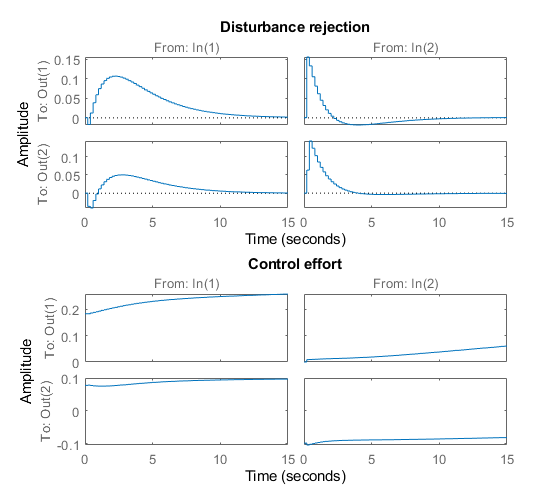
在小于5秒与最小之间交叉耦合的控制器响应促进和EGRMF变量。
简化控制结构的调整
状态空间控制器可以实现为是,但它往往是需要熬它归结为一个更简单,更熟悉的结构。要做到这一点,得到了调谐器,并检查其频率响应
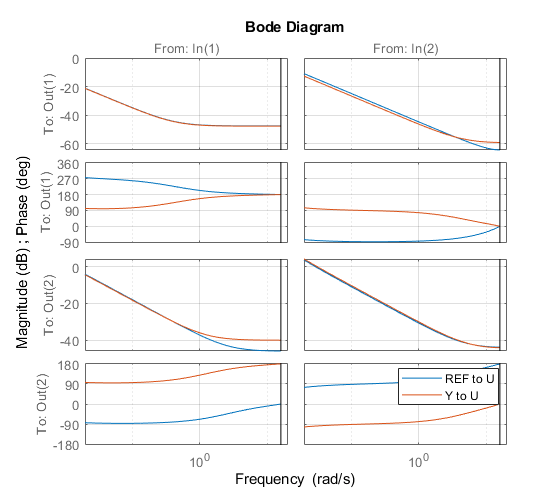
C = getBlockValue(ST1,'SS2');CLF博德(C(:,1:2),C(:,3:4),{02 20}),网格图例('REF至U','Y到U')
bodemag(C(:,5:6)),网格标题(“从FUELMASS /速度EGRLIFT / VGTPOS博德响应”)
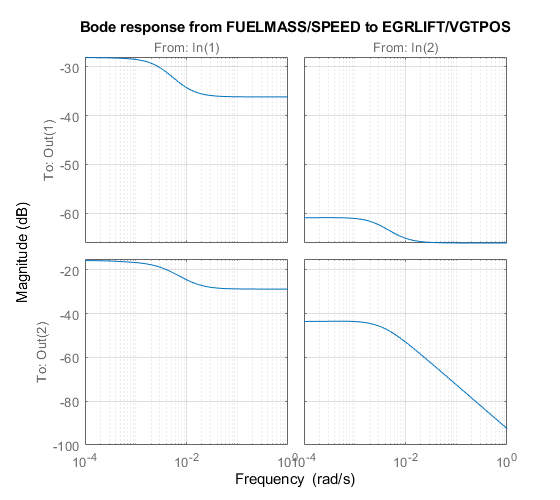
第一曲线表明,控制器基本上表现得像作用于REF-Y(目标和控制变量的实际值之间的差)一个PI控制器。的第二曲线表明,从测量的干扰传输到操纵变量可通过串联的增益具有滞后网络来代替。总之这表明由MIMO PI控制器与一阶扰动的前馈的下面简化控制结构。
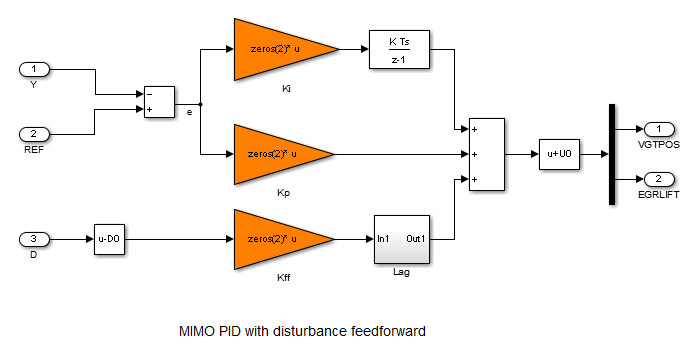
图2:简化控制结构。
使用变形子系统,可以实现在同一个Simulink模型既控制结构和使用一个变量在它们之间进行切换。万博1manbetx在此背景MODE = 2选择MIMO PI结构。由于,使用前systune调谐三个2×2增益矩阵KP,文,KFF在简化控制结构。
%选择“MIMO PI”在“控制器”块变MODE = 2;%配置调整界面ST0 = slTuner('rct_diesel'{“KP的,“文”,'KFF'});ST0.Ts = 0.2;addPoint(ST0,{'EGRLIFT','VGTPOS','柴油发动机'})%调谐MIMO PI控制器。ST2 = systune(ST0,[TR DR],[M1 M2 RO]);
决赛:软= 1.09,硬= 0.99986,迭代= 315
此外所有的要求都满足近。绘制闭环反应,并与状态空间设计比较。
CLF T2 = getIOTransfer(ST2,{'BOOST REF';'EGRMF REF'},{'促进','EGRMF','EGRLIFT','VGTPOS'});T2 = DIAG([1/10 1/3 1 1])* T2 * DIAG([10 3]);副区(211),步骤(T 1(1:2,:),T2(1:2,:),15),标题(“设定值跟踪”)图例('SS2','PI + FF')副区(212),步骤(T1(3:4,:),T2(3:4,:),15),标题(“控制力”)

D2 = getIOTransfer(ST2,{'FUELMASS';'速度'},{'促进','EGRMF','EGRLIFT','VGTPOS'});D2 = DIAG([1/10 1/3 1 1])* D2 * DIAG([5 -200]);副区(211),步骤(D1(1:2,:),D2(1:2,:),15),标题(“抗扰”)图例('SS2','PI + FF')副区(212),步骤(D1(3:4,:),D2(3:4,:),15),标题(“控制力”)
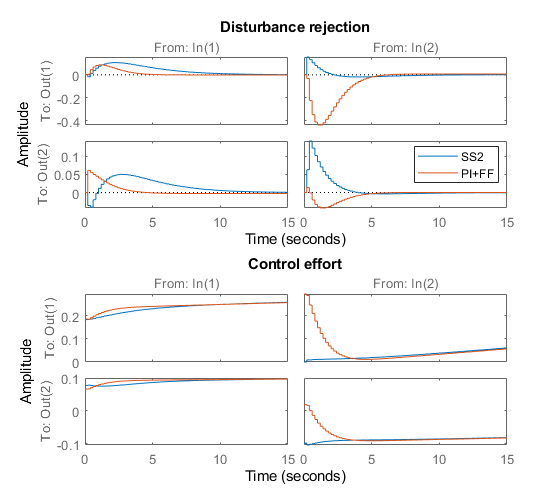
黑盒和简化控制结构提供相似的性能。检查PI和前馈增益的调谐值。
showTunable(ST2)
块1:rct_diesel /控制器/ MIMO PID / KP = d = U1 U2 Y1 -0.007988 -0.0007889 Y2 -0.02043 0.01444名称:静态的Kp增益。-----------------------------------块2:rct_diesel /控制器/ MIMO PID / KI = d = U1U2 Y1 -0.01055 -0.01415 -0.03006 Y2名称0.04647:文静态增益。-----------------------------------块3:rct_diesel /控制器/ MIMO PID / KFF = d = U1U2 Y1 0.01387 -9.812e-05 Y2 0.03275 -0.001452名称:KFF静态增益。
非线性验证
为了验证在Simulink模型的MIMO PI控制器,按下调谐控制器参数以Simul万博1manbetxink和运行模拟。
writeBlockValue(ST2)
仿真结果示于下面,并确认该控制器充分跟踪增压压力和EGR质量流量设置点的变化,快速地拒绝在燃料质量的变化(在t = 90)和在速度(在t = 110)。

图3:仿真结果与简化控制器。
也可以看看
TuningGoal.Margins|TuningGoal.MaxLoopGain|TuningGoal.StepRejection|TuningGoal.Tracking|slTuner|systune(slTuner)
相关话题
您还可以选择从下面的列表中的网站:
