控制器设计用于电力电子模型中使用频率响应数据
此示例示出了如何设计用于使用的Simscape™电气™组件中的Simulink建模的电力电子系统中的PID控制器。万博1manbetx
通常,电力电子系统不能线性化,因为它们使用高频开关元件,如脉宽调制(PWM)发电机。然而,大多数Simulink万博1manbetx®Control Design™PID整定工具都是基于线性化的工厂模型来设计PID增益的。要获得无法线性化的电力电子模型的这样一个模型,您可以:
如本例所示,估计一个频率范围内的植物频率响应。
使用System Identification Toolbox™软件估计工厂的线性模型的参数。举个例子,控制器设计用于电力电子模型中使用模拟I / O数据.
提高转炉模型
本例中使用升压转换器模型作为电力电子系统的一个例子。升压转换器电路中的一个直流电压到另一个,通常更高,通过控制斩波或源极电压的开关DC电压转换。
mdl ='scdboostconverter';open_system(MDL)
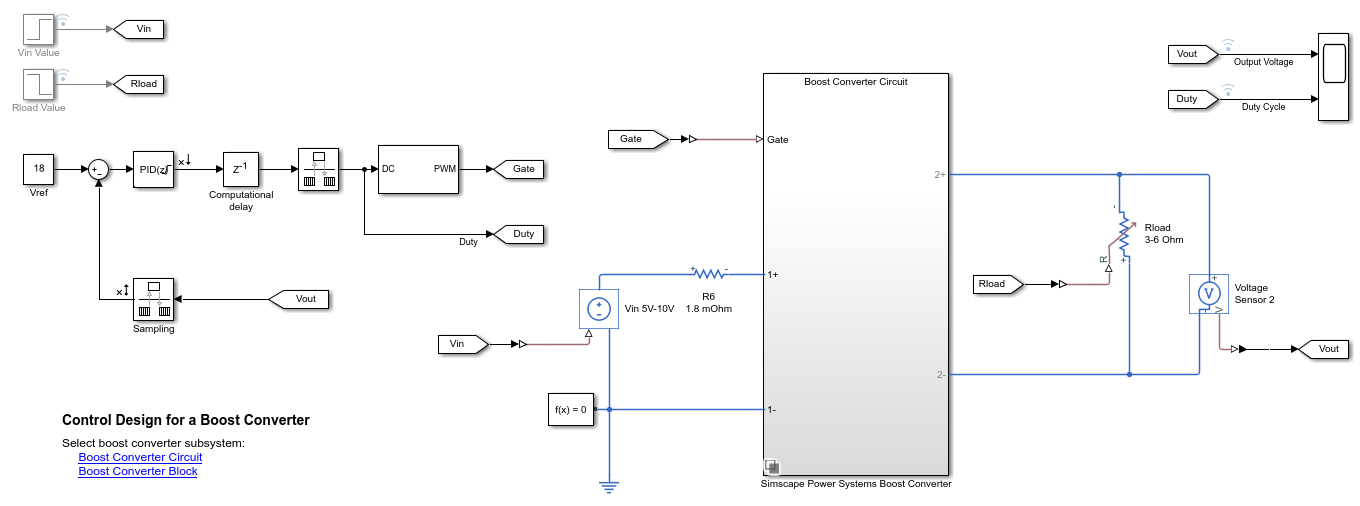
在这个模型中,一个由脉宽调制(PWM)信号驱动的MOSFET被用于开关。输出电压 是否应该规定为参考值
是否应该规定为参考值 .数字PID控制器调节PWM占空比,
.数字PID控制器调节PWM占空比, ,基于电压误差信号。对于本例,您可以估计PWM占空比到负载电压的频率响应.
,基于电压误差信号。对于本例,您可以估计PWM占空比到负载电压的频率响应.
Simscape电气软件包含许多电力电子系统的预定义块。该模型包含一个变量子系统,该子系统有两个版本的boost转换器模型:
使用电功率元件的升压转换器电路构成。所述电路元件的参数是基于[1]。
提高被配置为具有相同的参数作为升压转换器电路转换器模块。对于此块的更多信息,请参阅升压转换器.
查找型号工作点
以设计为升压转换器的控制器,你必须首先确定您要转换经营的稳态工作点。有关查找操作点的详细信息,请参阅查找的Simscape模型稳态工作点.对于这个例子,使用从模拟快照估计出的工作点。
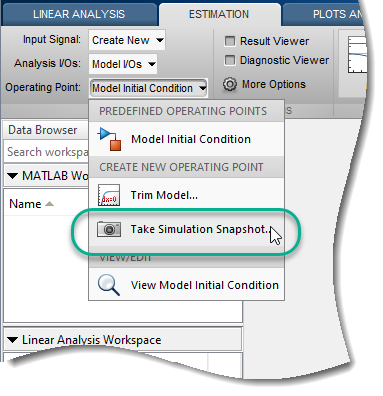
若要查找操作点,请使用线性化模型.打开线性化模型,在Simulin万博1manbetxk模型窗口中,对应用程序选项卡上,单击线性化模型.
在线性化模型,在线性分析选项卡,在操作点下拉列表中,选择采取模拟快照.
在“输入快照时间线性化”对话框中模拟快照倍字段中输入0.045,这足够闭环系统达到稳态。
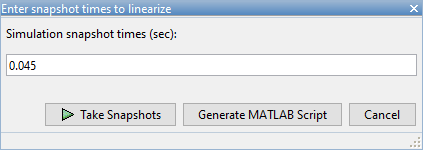
点击采取快照.
该软件模拟模型并创建包含在指定的快照时间模型的输入值和状态值的操作点。这个工作点,op_snapshot1,则添加到线性分析工作区.
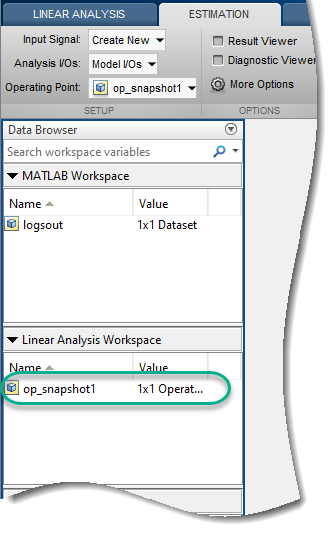
要使用计算的操作点初始化模型,双击op_snapshot1.
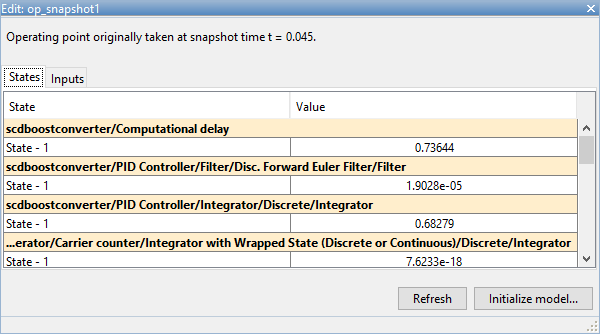
在编辑对话框中,单击初始化模型.
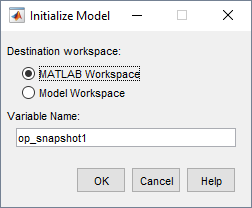
在“初始化模型”对话框中选择MATLAB工作区,然后单击好.软件出口工作点的工作区MATLAB®并初始化与工作点的输入和状态模型。
收集频率响应数据
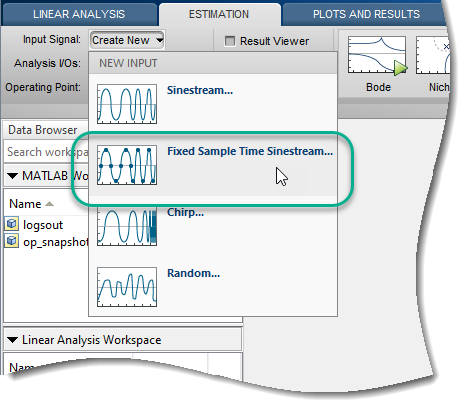
要收集频率响应数据,您必须首先指定一个输入信号。对于本例,使用固定的步骤sinestream信号。有关定义sinestream输入信号的更多信息,请参见Sinestream输入信号.
在估计选项卡,在输入信号下拉列表中,点击固定采样时间.
在指定固定的采样时间对话框,指定样品时间的5 e-6秒。
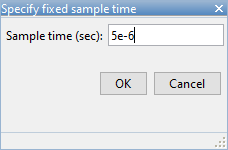
点击好.
在“创建sinestream输入与固定采样时间”对话框中,配置sinestream信号的参数。
指定估计的频率单位。在频率单位下拉列表中,选择赫兹.
对于这个例子中,频率响应估计可以使用每个频率的一个模拟或一个模拟的所有频率。在模拟订单下拉列表,选择默认选项对所有频率的单模拟.如果您有并行计算工具箱™软件,可以加快通过选择频率响应估计每个模拟一个频率并使得用于估计的并行池。要启用并行池,在估计选项卡上,单击更多的选择,然后在对话框中选择估计过程中使用并行池.
要指定这估计工厂的响应频率,点击+图标。
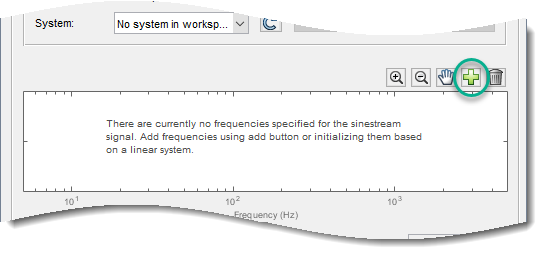
在“添加频率”对话框中指定15对数间隔的频率范围从50赫兹来5 kHz.
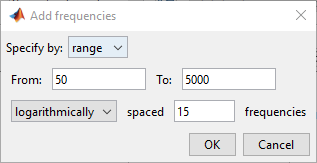
点击好
为了保证系统正常兴奋,在所有的频率设定的幅度。如果输入幅度过大,升压转换器将在非连续电流模式操作。如果输入幅度太小,sinestream将从电力电子电路涟漪没有什么区别。这两种情况下产生不准确的频率响应的估计结果。
要设定的幅度,首先选择在绘图区域内的所有频率。然后,在振幅字段,类型0.01.
保持所有其他sinestream设置的默认值。
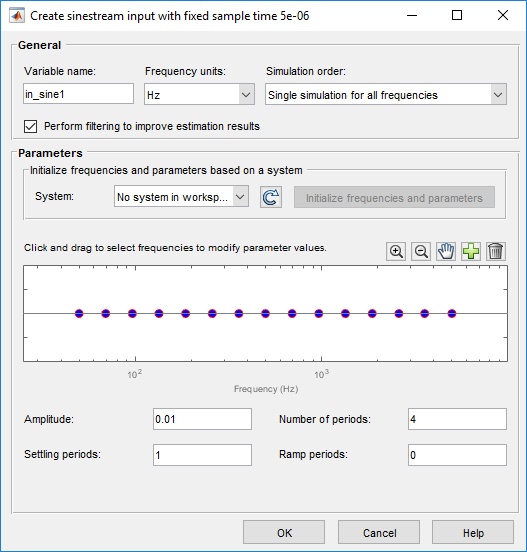
要创建sinestream信号,单击好.
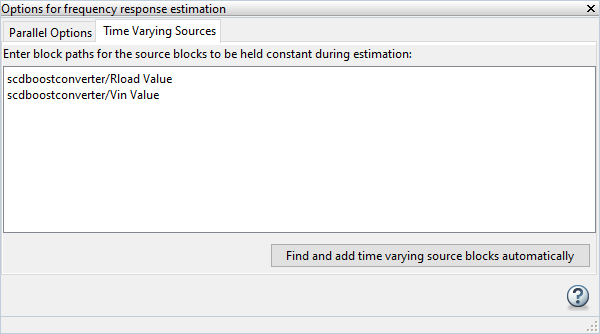
该模型具有建模为阶跃函数,将与频率响应估计干扰随时间变化的线路和负载干扰。为了保持在模拟过程中这些干扰不变,单击更多的选择.然后,在频响估计选项对话框中,对时间都有不同的来源选项卡上,单击找到并自动添加时间变源块.
估计和绘制的频率响应,在估计选项卡上,单击预兆.
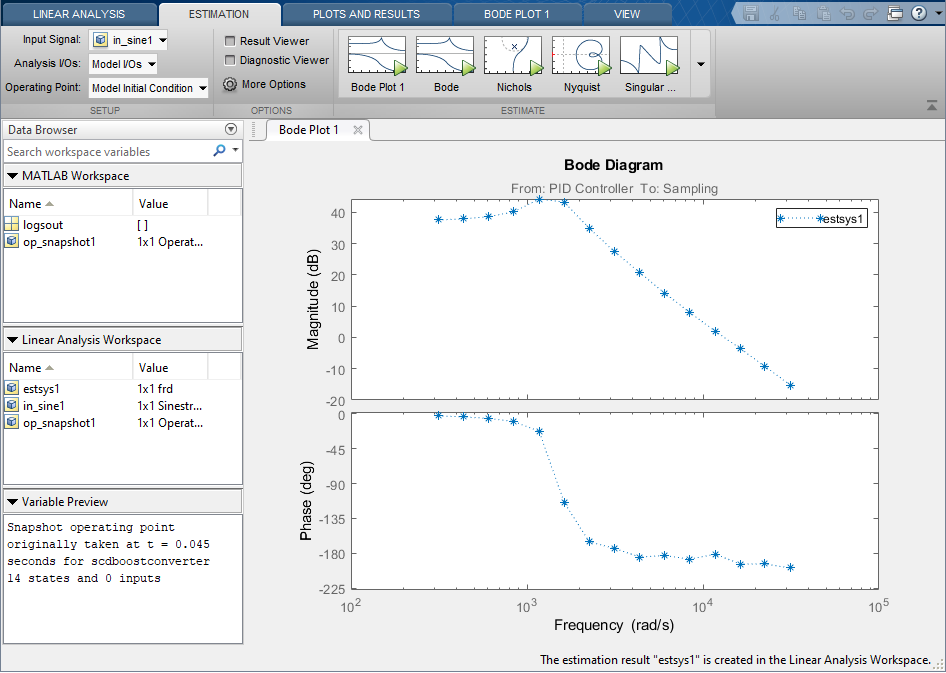
该软件估计的频率响应,并显示结果波特图1.频率响应是使用离散的点和节目1200和1600弧度之间的峰值响应标绘/秒。
要调整PID控制器,你必须导出频率响应与MATLAB®工作区。在数据浏览器,拖estsys1来自线性分析工作区到MATLAB工作区.

指定控制器的结构
在调试PID控制器块之前使用PID调节器,必须先指定控制器结构。要做到这一点,双击PID控制器块。然后,指定以下控制器参数:
调节器
形式
时间域
离散时间设置
其它设置,诸如控制器的初始条件,输出饱和电平,和抗饱和配置
对于本例,使用当前控制器配置;也就是说,一个离散时间的并行形式的PID控制器没有反卷。
使用PID调节器,你可以调整以下控制器模块的参数:
如果您的模型使用的Simscape电气离散PI控制器块或离散PI控制器积分抗饱和块,您必须在调优之前用PID控制器块替换此块。
校正控制器
打开PID调节器,点击调优.当PID调节器首先打开,它尝试线性化模型。由于PWM分量,模型解析线性化为零。
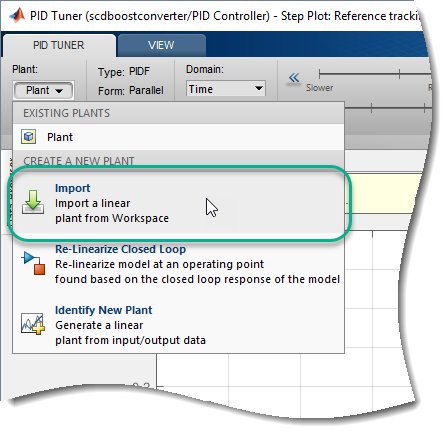
在这个例子中,你调使用估计的频率响应数据的工厂模型控制器。要导入的频率响应数据,在PID调节器选项卡上,单击厂,然后,下面新建一个工厂,点击进口.
在获得工厂模型对话框中,选择导入LTI系统,然后在表中选择estsys1.
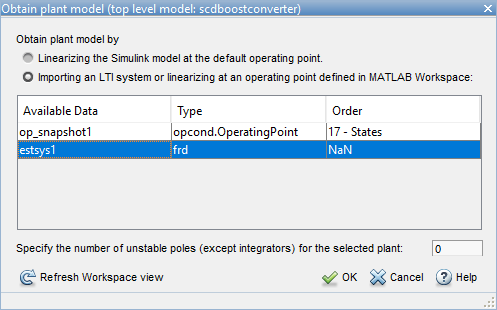
点击好.
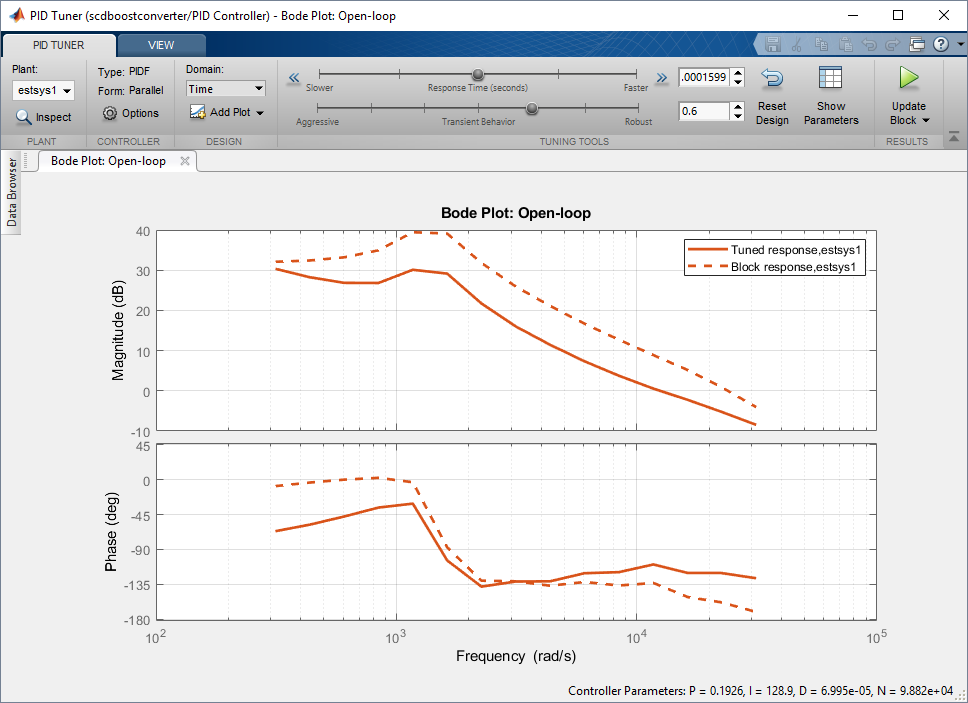
由于您使用的是估计的频率响应,PID调节器无法绘制阶跃响应。要查看频率响应,请单击加入波形图,在预兆,点击开环.
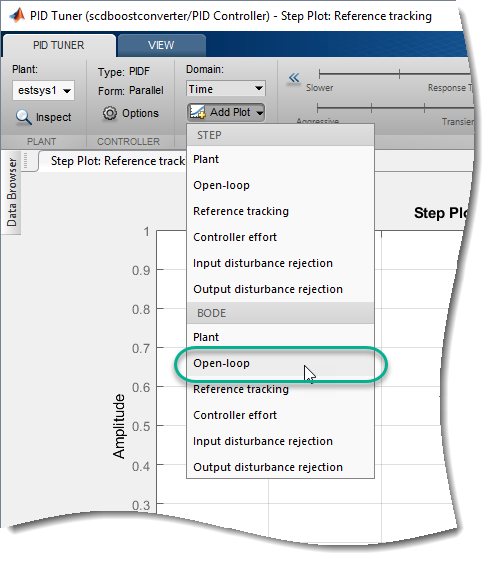
关闭步骤剧情文档。
Bode曲线图示出了块响应(虚线)和一调谐响应(实线)。块响应是用于PID控制器块中的当前PID增益的开环响应。调谐响应是利用在调谐PID增益的开环响应PID调节器.
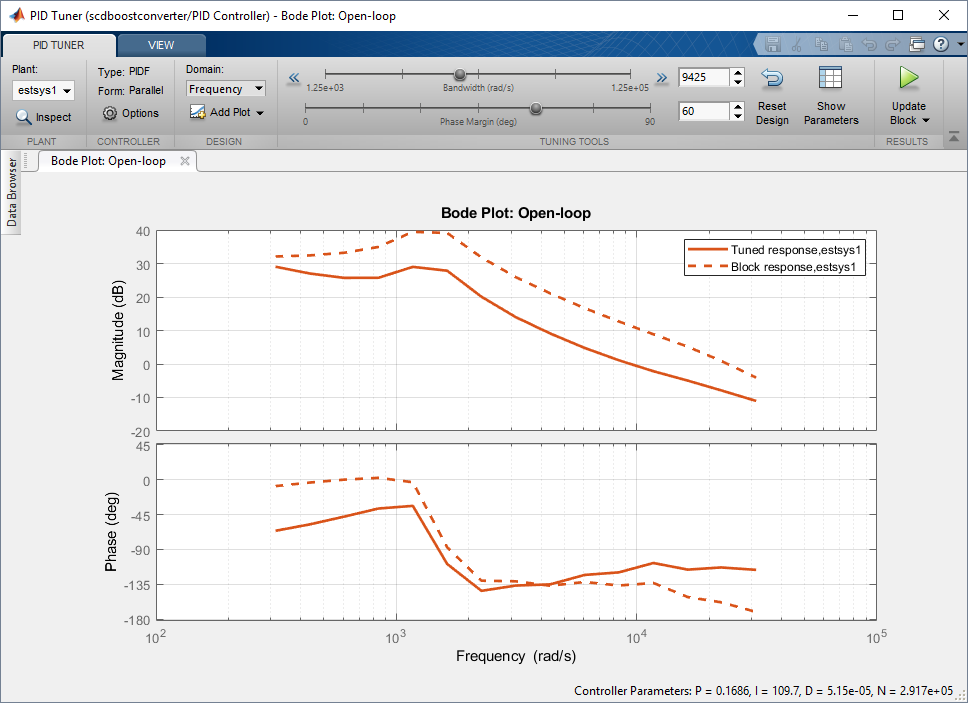
从频宽和相位裕度两方面对控制器进行调整,设计频域控制器。在域下拉列表中,选择频率.
对于本例,设置带宽和阶段保证金根据[1]规定的设计标准,分别为9425 rad/s (1.5 kHz)和60℃。
PID调节器满足这些设计规格选择控制器参数。
要查看调谐控制器参数和性能度量,包括增益和相位余量,点击显示参数.调谐结果具有无限增益裕度,并在约9425拉德65度的相位裕度/秒。
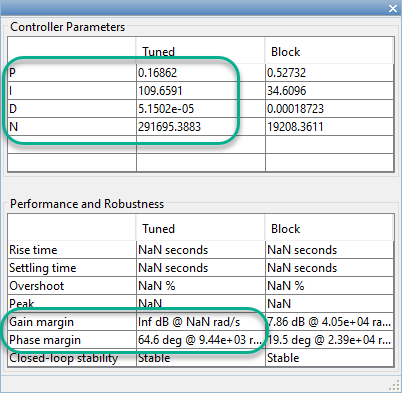
要更新与调整增益的PID控制器模块,请点击更新块.
验证控制器
您可以使用带有线路和负载干扰的模拟来检查调整后的控制器性能。为了检验控制器的动态性能,Simulink模型使用了以下干扰:万博1manbetx
线干扰在t = 0.075秒,这会增加输入电压,
 从5V到10V。
从5V到10V。t = 0.1秒时的负载扰动,增加了负载电阻,
 从3欧姆到6欧姆。
从3欧姆到6欧姆。


模拟模型。
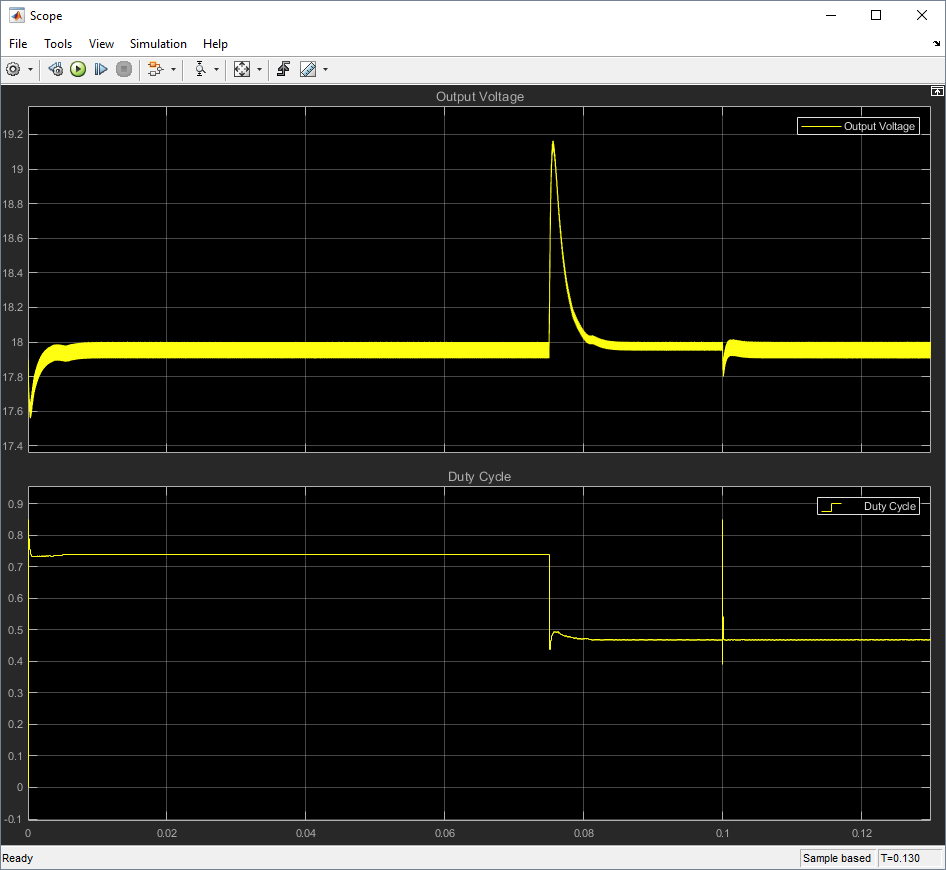
该控制器能很好地抑制线路和负载扰动。
参考
李[1],s.w.。电压型升压变换器的实用反馈回路分析。Application Report No. SLVA057. Texas Instruments. January 2014. www.ti.com/lit/an/slva633/slva633.pdf
bdclose(MDL)