


机器人手臂两个传送带传输部分
2017 b: https://github.com/mathworks/Simscape-Robot-Conveyor-Belts/archive/17.2.1.2.zipForR2017年:https://github.com/mathworks/Simscape-Robot-Conveyor-Belts/archive/17.1.1.1.zipForR2016 b: https://github.com/mathworks/Simscape-Robot-Conveyor-Belts/archive/16.2.1.0.zipThe机器人手臂模型

机器人手臂两个传送带传输部分
2017 b: https://github.com/mathworks/Simscape-Robot-Conveyor-Belts/archive/17.2.1.2.zipForR2017年:https://github.com/mathworks/Simscape-Robot-Conveyor-Belts/archive/17.1.1.1.zipForR2016 b: https://github.com/mathworks/Simscape-Robot-Conveyor-Belts/archive/16.2.1.0.zipThe机器人手臂模型

手臂机器人控制系统
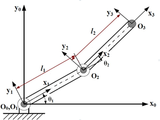
求解逆运动学模型手臂机器人
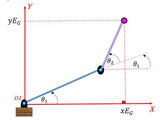
计算和可视化2-link机器人的逆运动学手臂随着雅可比矩阵,使机器人写你好。
这个例子显示了如何定义一个双连杆平面机器人手臂符号变量,计算运动学和逆解。这个例子也与轮廓图可视化结果

一个机器人手臂复制的手臂人类操作员的手势。
本项目旨在开发一个机器人手臂,可以复制手臂人类操作员的运动。人类的运营商手臂手势是获得使用骨骼从Kinect的深度图像


这是一个为一个3自由度机器人Simscape模型手臂
在此提交我们模型的一小升高3自由度(自由度)机器人手臂在MATLAB Simscape从www.roboholicmaniacs.com购买。在此使用的致动器手臂是步进电机

这是一个仿真软件模型万博1manbetx来控制机器人手臂使用Kinect传感器捕获的手势。
这是一个仿真软件模型万博1manbetx来控制机器人手臂使用Kinect传感器捕获的手势。一个机器人手臂开发使用伺服电机,复制了对吧手臂肩、肘和手

单击并拖动观看手臂回应。包括了良好的注释派生的代码。
视频:https://www.youtube.com/watch?v = cmW7pRLut8A2-link平面手臂兼容控制器和重力补偿。用户可以单击并拖动来移动末端执行器的目标位置

Matlab工具箱寻找转换从相机到机器人手臂基地
相机,手臂-CalibrationThe方法操作通过最小化的参数的差异棋盘的位置由摄像头和给出手臂当它投射到

机器人模拟和动画三个链接手臂提高玻璃表高度。
控制一个机器人手臂通过使用Kinect 2.0
的7自由度模型手臂机器人在MATLAB仿真软件与滑万博1manbetx动模式控制器控制。
的7自由度模型手臂机器人在MATLAB仿真软件与滑万博1manbetx动模式控制器控制。模型将包括动态模型,驱动系统,控制器的实时3 d表示
这个提交包含所需的所有文件来控制机器人手臂使用仿真软件万博1manbetx,Arduino和ThingSpeak
我们使用仿真软件万博1manbetx,ThingSpeak和Arduino程序的机器人手臂这样就可以控制从几乎任何地方。然后我们使用thingspeak发送命令到Arduino MKR1000点

逆运动学我手臂模型使用伪逆雅可比矩阵
逆运动学3自由度的我手臂Matlab模型模拟基于伪逆雅可比矩阵的方法。仿真尚未设置操作范围,所以我们可以看到时手臂努力达到

滑移模型,包括液压致动器手臂桶倾斜,多体动力学。
与以前的MATLAB.For版本兼容R2023年:使用下载buttonForR2022 b: https://github.com/mathworks/Simscape-Backhoe-手臂/归档/ 22.2.2.12.zipForR
3自由度正运动学手臂我的机器人仿真(GUI)模式手臂使用Denavit-Hartenberg公约
MatLab GUI控制5Rsymetrical并联机构
项目视频(Youtube): https://youtu。/ Xbq9lMkz1VgGUI: - PanelRobot.fig。MatLab GUI控制5Rsymetrical并行机制。有一个bug湿草地防止直接打开GUI。它是

万博1manbetx仿真软件示例模型来演示使用ROS一起创建一个多节点机器人系统硬件支持包。万博1manbetx
这个提交包含示例文件使用仿真软件界面RaspberryPi和Arduino和活性氧。万博1manbetx我们使用了一个Arduino和坡道板来控制我们的机器人手臂它包含3步进
易于使用的GUI完全可配置的模拟2-joint机器人逆运动学手臂。
这个工具箱中创建一个项目工作6。法兰克福大学学期的机器人和自治系统的应用科学。由于语法变化R2020 b,这个版本有效
在弗吉尼亚州的案例研究R和脑血管意外R优化
此文件夹中的文件解决本文中描述的优化案例研究”R对脑血管意外R在风险管理和优化“Sarykalin年代。Serraino, G。,Uryasev年代。,在教程

机器人手臂驱动电并通过一连串的pid控制。
机器人手臂驱动电并通过一连串的pid控制(速度环和位置环)。六个电机用于驱动机器人的关节。
解决了一个简单的机器人逆运动学问题手臂并启动“p”运动所需的点。
解决了一个简化的2 d机器人逆运动学问题手臂用“n”链接变量lengts的r”。需要补充的程序由每Sundqvist cylinder2P
圈圈叉叉玩机器人手臂
圈圈叉叉玩机器人手臂,使用一个战争信息局的机器人手臂优势,与5 v控制继电器和arduino大型。汽车的位置是MATLAB使用电位器反馈。
代码实现正规化常见的空间模式与聚合(R-CSP-A)算法。
Matlab源代码正规化常见空间格局与聚合(R-CSP-A) %(算法)%这里提供的matlab代码实现R-CSP-A算法提出
建模与仿真的MATLA万博1manbetxB和Simulink文件ROBOTIS OpenManipulator
机器人手臂3 d使用c
机器人手臂3 d使用运动学

提出了控制系统的案例研究在机械手库卡KR6线性化控制系统进行了描述R900年。
机械手库卡KR6R900年。[1]约翰·j·克雷格·非线性控制的机械手,介绍机器人技术,培生教育,2005年
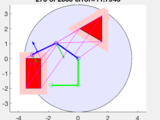
n-link平面机器人的路径规划手臂移动多边形之间的障碍(或点障碍)。设置参数预先构建的示例。
一个n-link平面机器人的路径规划手臂移动多边形之间的障碍(或点障碍)。在https://youtu视频概述。是/ xqTdsxyIths视频使用工作区潜在的领域
这SimMechanics™模型实现了4轮罗孚悬架和一个机器人手臂。
我是汽车悬架的发展模型。实现一个四分之一的车后,我觉得这可能是酷结合四季度汽车”模型和一个简单的手臂创建一个探测器装备

下面的文件包含一个非线性自适应观测器为一个简单的机器人手臂。状态估计在断层的存在。
方法对两连杆机械手的动力学模型预测控制机器人。

这是主人和奴隶之间的同步设计的分布式合作单位与健壮的观察者。
单一的机器人手臂的可操纵性和自动化的有效性。然而,控制多个机器人手臂系统构成巨大的挑战。一个集中控制器可能无法处理
扫描多个表面的球形物体的周围
角的机器人手臂必须点传感器为了保持normal-to-surface要求。

在这个项目中,一个2的逆运动学R平面机器人解决了使用自适应神经模糊推理系统(简称ANFIS)。
在这个项目中,一个2的逆运动学R平面机器人解决了使用自适应神经模糊推理系统(简称ANFIS)。这段代码包含一个二自由度平面机器人的动画。
在这个项目中,一个2的逆运动学R平面机器人解决了使用非线性人工神经网络(ANN)。
在这个项目中,一个2的逆运动学R平面机器人解决了使用非线性人工神经网络(ANN)。代码包含一个二自由度平面机器人的动画。

实现三种不同的采样方法(露水、修复RNearN)

一个back-of-envelop Microsat——(K14教育)模型R碎片盖博图的框架和模型提出了轨道的性质。
该文件允许创建图像处理系统机器人机械手。
解释的视频:https://www.youtube.com/watch?v=4rRiBvy997AThe项目包括一分之三循环迭代测量位置的磁带的时候位于三个允许的地区之一。

三轴机器人的控制模型手臂。
该仿真软件万博1manbetx模型用于控制一个机器人手臂有三个自由度。为了达到这个目标,三个控制器设计;一个用于每一个马达。这个模型显示了基本

示例文件肖像绘画使用图像行转换和逆运动学。
这个提交包含所有的演示文件使用机器人肖像图手臂和一个网络摄像头。这些文件包括从网络摄像头获取图像,灰度转换,边缘检测

统计健壮的脑电图点将零度过程减轻参考效果
这个MATLAB脚本由菲尔·a·杜克博士乔治•Fuggetta博士和凯尔博士问:已执行点将零度使用健壮的常见的平均引用(r车)过程提出的理,克莱默
优化算法的机器人逆运动学的MATLAB源代码
这项工作提出了一种方法来解决任何类型的机器人的逆运动学问题手臂使用优化算法。这种方法使逆运动学非常简单的操作

机器人手臂在履带
机器人手臂在履带

Kinova Gen3机械手MATLAB和Sim万博1manbetxulink的支持万博1manbetx
连接到Kinova Gen3机器人和操作手臂使用MATLAB解决逆运动学问题使用刚体树木和移动Kinova Gen3机器人机械手按照期望的轨迹

并串联混合动力汽车的模型与系统级和电气系统的详细的变体。
MATLAB.ForR2023年:使用下载按钮上面R2022 b: https://github.com/mathworks/Simscape-HEV-Series-Parallel/archive/22.2.4.5.zipForR

并串联混合动力汽车的模型与系统级和电气系统的详细的变体。
MATLAB.ForR2023年:使用下载按钮上面R2022 b: https://github.com/mathworks/Simscape-HEV-Series-Parallel/archive/22.2.4.5.zipForR

这个程序使用指标连续分析声音和振动数据噪声和振动。
主程序是Main_sound_and_vibs.m。有几个指标的声音,手手臂全身振动,振动,晕动病。Main_sound_and_vibs调用主要依赖

转发平面二自由度机器人机械手的动态连续时间函数输入τ的输入函数和离散时间τ

锂离子电池特性、状态估计、细胞平衡、和热管理
从数据表信息。这个网站包含额外的信息使用MathWorks电池建模(R
在附呈的档案中你会发现这个图形用户界面(MATLAB GUI)正向和逆向运动学的多自由度机器人手臂。
2维逆运动学仿真3自由度使用伪逆雅可比矩阵

自动程序烦恼EDR V5机器人大脑使用仿真软件万博1manbetx

SPS模拟优化模型通过使用一个聚合MMC。
implementedusing聚合模型来模拟36每个功率模块手臂。这个aggregatemodel控制系统动力学、变频器谐波和循环currentsphenomena都有利。然而

定义三维笛卡尔坐标系的位置的基础上至少3 non-collinear点
这个包中包含的主要功能称为帧。框架构建一个方向矩阵R代表一个右手方向的三维笛卡尔坐标系,基于的位置
使用自定义ROS在MATLAB和Simulink消息和服务类型。万博1manbetx
注意:这个支持包的功能万博1manbetxR2017一个R2020 a。从R2020 b, ROS生成自定义消息是没有这种支持直接从ROS的工具箱支持包。万博1manbetx使用ROS

RoboDK API允许您直接从Matlab模拟和程序机器人手臂的代码
机器人对Matlab仿真和离线ProgrammingWith RoboDK API你可以模拟和程序的机器人手臂使用Matlab代码。模拟机器人直接从Matlab程序,生成
非线性控制的3自由度PUMA机器人
动力来自:布莱恩·阿姆斯特朗Oussama himani哈提卜,乔尔Burdick“显式动力学模型和惯性参数的彪马560手臂”,斯坦福大学人工智能实验室