PID整定是找出PID控制器的比例增益、积分增益和导数增益值以达到预期性能和满足设计要求的过程。
PID控制器调优看起来很容易,但是找到一组增益来确保控制系统的最佳性能是一项复杂的任务。传统上,PID控制器要么手动调优,要么使用基于规则的方法。手动调优方法是反复的、耗时的,如果在硬件上使用,它们可能会造成损害。基于规则的方法也有严重的局限性:它们不支持某些类型的植物模型,如不稳定的植物、高阶植物或几乎没有时间延迟的植物。万博1manbetx
您可以使用软件工具自动调整PID控制器,以实现最优的系统设计,并满足设计要求,即使是传统的基于规则的方法不能很好地处理的工厂模型。
有关PID控制器自动调谐的更多信息,请参见控制系统工具箱™使用MATLAB®和万博1manbetx®.
一个自动PID调优工作流包括:
- 根据输入-输出测试数据识别工厂模型
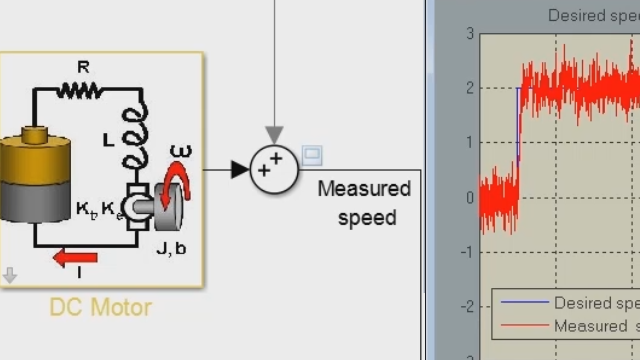
- PID控制器建模(例如,在MATLAB中使用PID对象或在Simulink中使用PID控制器块)万博1manbetx
- 自动调整PID控制器增益和微调您的设计交互式
- 批量调优多个控制器
- 整定单输入单输出PID控制器以及多回路PID控制器架构