 克利夫的角落:克莱夫·莫勒(Cleve Moler)在数学和计算上
克利夫的角落:克莱夫·莫勒(Cleve Moler)在数学和计算上 MATLAB博客
MATLAB博客 Steve on Image Processing with MATLAB
Steve on Image Processing with MATLAB 家伙在simu万博1manbetxlink上
家伙在simu万博1manbetxlink上 深度学习
深度学习 开发人员区
开发人员区 Stuart’s MATLAB Videos
Stuart’s MATLAB Videos Behind the Headlines
Behind the Headlines File Exchange Pick of the Week
File Exchange Pick of the Week 汉斯在物联网上
汉斯在物联网上 学生休息室
学生休息室 MATLAB社区
MATLAB社区 matlabユーザーコミュニティー
matlabユーザーコミュニティー 初创企业,加速器和企业家
初创企业,加速器和企业家Olympic 2016 – Pole Vault
For this second post in our Olympics series, I am happy to welcome guest blogger Amit Raj to describe how he simulated the撑竿跳高竞赛。
介绍
田径比赛是奥运会上最受欢迎的运动运动之一。撑杆跳是一场田径事件,运动员使用长柔性杆作为跳过酒吧的帮助。从历史上看,撑杆跳被用来跳过运河和沼泽。自1896年以来,撑竿跳高运动一直是奥运会的活动。

Conservation of Energy
Vaulting is a prime example to demonstrate the节能原则。The athlete builds up kinetic energy and uses the pole to convert this into potential energy.
当前的世界纪录是Sergey Bubka设定的6.14 m。最快的冲刺的记录是Usain Bolt,以略高于12 m/s的速度。但是,沃尔斯需要随杆的重量冲刺。如果我们是合理的,并且假设10m/s的冲刺,则为我们的高度:
This is the change in height of center of mass. If we assume an initial height of center of mass at 1m we have a height of 6.102 which is pretty close to the world record.
物理工作...是的!
The phases
Although speed is important to determine the height, the technique of the vaulter also decides how effectively all the kinetic energy can be converted into potential energy. The conversion usually happens in multiple stages.
The generally accepted model for pole vaulting consist of the following phases:
- Approach:在此阶段,运动员试图最大化沿跑道的速度以达到最大动能
- 种植并起飞:运动员将杆定位到“盒子”中,以将动能转换为杆中的势能
- 摆动:The athlete moves the swing leg forward and tries to keep the pole bent longer to achieve an optimal position for the
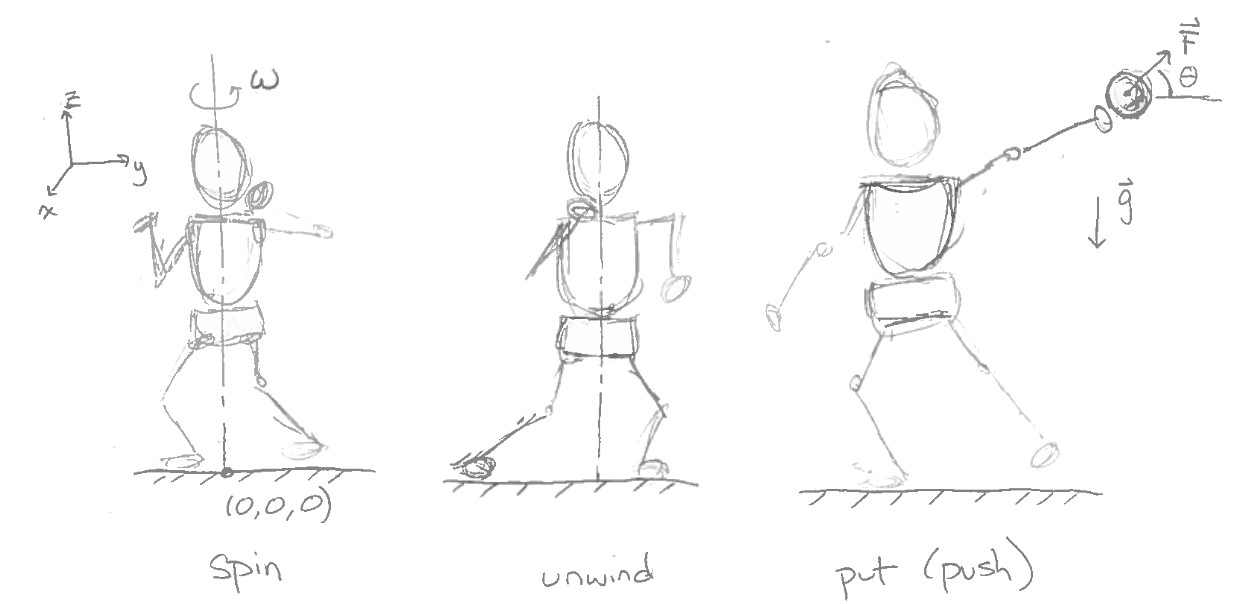
发布 - 转动:The vaulter spins 180 towards the pole while extending the arm
- Fly away:Vaulter在重力的影响下释放了杆子,然后落在垫子上
Let's now see how we can simulate that.
该模型
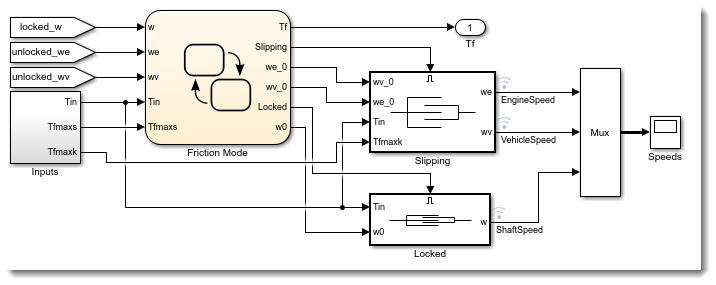
We model the above phases using three main stages – The run up, take off and release. In Simulink, each stage is aIf Action Subsystem由自己的动态方程组成。挑战在于在不同的动态之间切换并保持连续性。
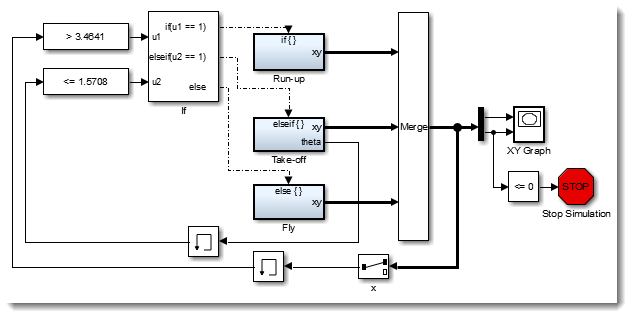
第一阶段非常简单,我们只是以10 m/s的恒定速度运行。这里要注意的重要一件事是使用state port。
When the If condition changes from the running subsystem to the takeoff, the state ports of the Integrator blocks write to Goto blocks. In the Takeoff subsystem, we can then use From blocks to receive the final state of the run to initialize the takeoff subsystem.
In this case, the run was computed in a Cartesian coordinate system, but we decided to implement the takeoff in a polar coordinate system. Solving the equation for the bending of the pole is simpler in polar coordinates, where the integrated states are the length and angle of the pole.
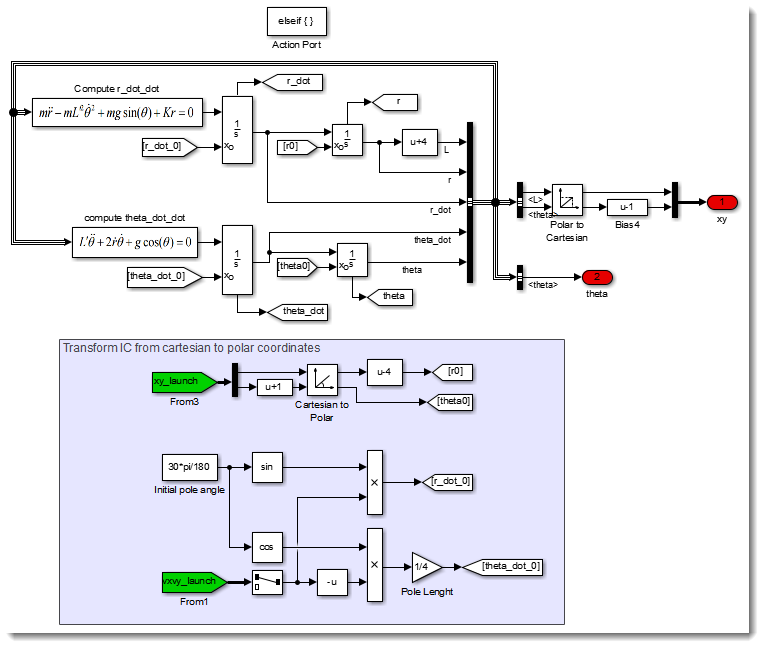
一旦杆达到90度,就该放开并切换到飞行阶段了。
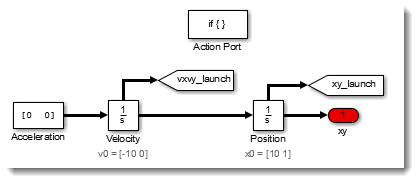
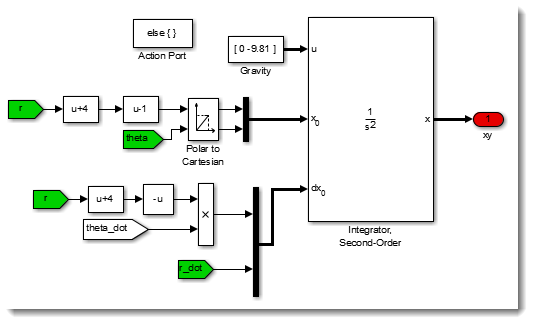
In a similar manner as the previous transition, we pass the final states through Goto and From blocks. In the flight subsystem, we convert back to Cartesian coordinates and let the gravity do the work.
现在轮到你了
在这里下载模型,并尝试不同的参数,以查看在奥运会上赢得撑竿跳高竞赛的最佳配置。





注释
To leave a comment, please click这里to sign in to your MathWorks Account or create a new one.