 克利夫角:克利夫·莫尔谈数学和计算机
克利夫角:克利夫·莫尔谈数学和计算机 罗兰关于MATLAB的艺术
罗兰关于MATLAB的艺术 用MATLAB进行图像处理
用MATLAB进行图像处理 人在仿真软件万博1manbetx
人在仿真软件万博1manbetx 深度学习
深度学习 开发区域
开发区域 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 在标题后面
在标题后面 本周文件交换精选
本周文件交换精选 汉斯在物联网
汉斯在物联网 学生休息室
学生休息室 初创企业、加速器和企业家
初创企业、加速器和企业家 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー2016年奥运会——撑杆跳高
在我们奥运系列的第二篇文章中,我很高兴欢迎嘉宾博客Amit Raj来描述他是如何模拟撑杆跳竞争。
介绍
田径项目是奥运会中最受欢迎的运动项目之一。撑杆跳是一项田径项目,运动员用一根长而灵活的撑杆作为辅助物跳过一根横杆。历史上,撑杆跳拱顶被用来跳过运河和沼泽。撑杆跳从1896年开始成为奥运会的主要项目。

能量守恒
跳马就是一个很好的例子能量守恒原理.运动员积累动能,利用杆子将其转化为势能。
目前的世界纪录是由谢尔盖·布卡创造的6.14米。最快的短跑纪录是由尤塞恩·博尔特创造的,速度略高于12米/秒。然而,跳高运动员需要用撑杆的重量来冲刺。如果我们假设一个10m/s的sprint是合理的,那么我们得到的高度是:
这是质心高度的变化量。如果我们假设质心的初始高度是1米,那么高度是6.102,非常接近世界纪录。
物理工作……是啊!
阶段
虽然速度是决定高度的重要因素,但跳高运动员的技术也决定了所有动能转化为势能的有效程度。这种转换通常分多个阶段进行。
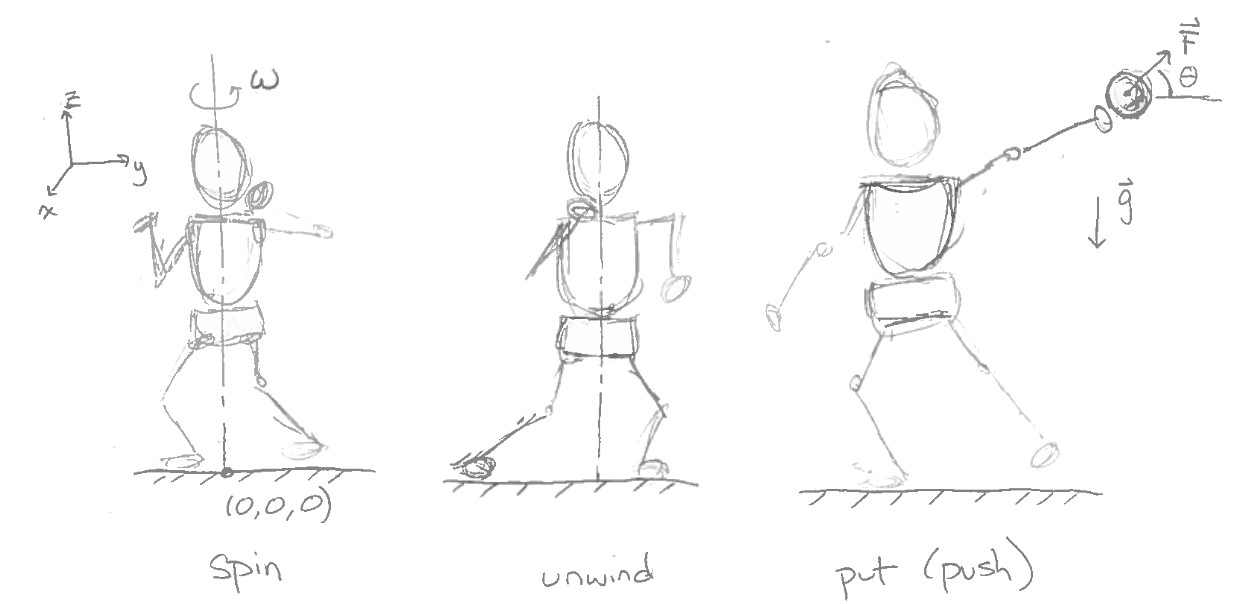
撑杆跳的一般模型包括以下几个阶段:
- 方法:在这个阶段,运动员试图沿着跑道最大化他的速度,以获得最大的动能
- 种植和起飞:运动员将杆子放置在“盒子”中,将动能转换为杆子中储存的势能
- 摇摆不定:运动员将摆动腿向前移动,并尽量保持杆弯曲的时间更长,以达到最佳的姿势
释放 - 转:跳马运动员伸展手臂时,向撑竿跳180转
- 飞:在重力的影响下,跳高运动员松开撑杆,跌倒在垫子上
现在我们来模拟一下。
该模型
我们使用三个主要阶段对上述阶段进行建模——运行、起飞和释放。在Si万博1manbetxmulink中,每个阶段都是一个如果行动子系统由它自己的一组动力学方程控制。挑战在于在不同的动态之间切换并保持连续性。
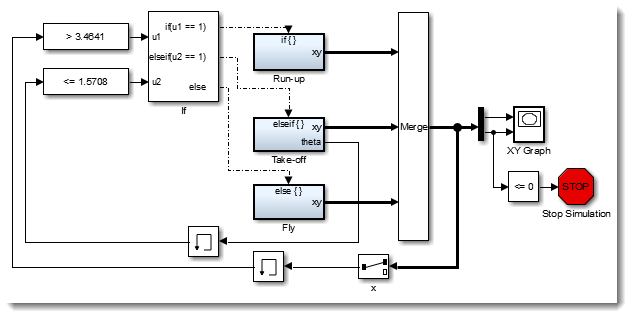
第一阶段很简单,我们以10m /s的恒定速度运行。这里需要注意的是The的用法州港口.
当If条件从正在运行的子系统变为起飞时,Integrator块的状态端口写入Goto块。在起飞子系统中,我们可以使用From块来接收运行的最终状态,以初始化起飞子系统。
在本例中,运行是在笛卡尔坐标系中计算的,但我们决定在极坐标系统中实现起飞。在极坐标中,极点弯曲方程的求解比较简单,在极坐标中,积分状态是极点的长度和角度。
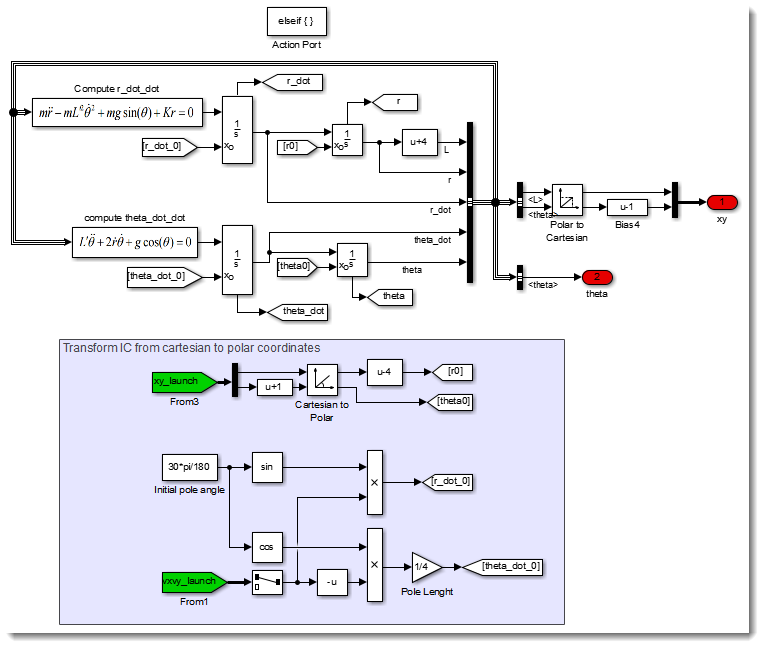
一旦极点达到90度,就该放手,切换到飞行阶段了。
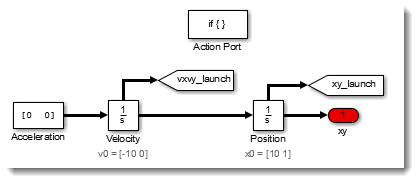
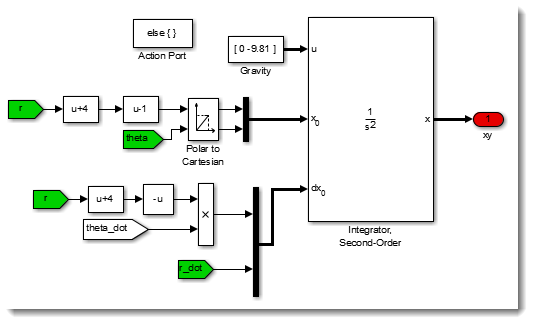
与前面的转换类似,我们通过Goto和From块传递最终状态。在飞行子系统中,我们转换回笛卡尔坐标让重力做功。
现在轮到你了
在这里下载模型,并尝试不同的参数,看看什么是赢得奥运会撑杆跳比赛的最佳配置。







评论
要留下评论,请点击在这里登录到您的MathWorks帐户或创建一个新帐户。