 克利夫角:克利夫·莫尔谈数学和计算
克利夫角:克利夫·莫尔谈数学和计算 MATLAB博客
MATLAB博客 Steve用MATLAB进行图像处理
Steve用MATLAB进行图像处理 Simulin万博1manbetxk上的家伙
Simulin万博1manbetxk上的家伙 人工智能
人工智能 开发区域
开发区域 Stuart的MATLAB视频
Stuart的MATLAB视频 新闻头条背后
新闻头条背后 本周文件交换精选
本周文件交换精选 汉斯谈物联网
汉斯谈物联网 学生休息室
学生休息室 MATLAB社区
MATLAB社区 Matlabユザコミュニティ
Matlabユザコミュニティ 初创公司,加速器和企业家
初创公司,加速器和企业家 自治系统
自治系统
用MATLAB和Arduino破解你自己的私人健身教练
今天加入我们的是
安东尼Sharonov
, Anthony最近获得了MATLAB的最佳使用奖
Hack3
世界上最大的高中生黑客马拉松!往下读,了解安东尼的方法可以帮助你改善你的锻炼形式!交给你了,安东尼……

大家好!我是安东尼Sharonov我的父母移民到美国后,我出生在费城。从那里我们搬到了康涅狄格州,在那里我第一次对工程学产生了兴趣。我的中学有一门课,让我可以探索自己的兴趣,我们为科学展览做项目。现在,我每天的大部分时间要么是摆弄电子产品,要么是打网球和网络游戏,要么就是和朋友们出去玩。我也是一个摇滚迷,更确切地说,我是枪花乐队、电光乐团、奥兹·奥斯本和史蒂夫·米勒乐队的粉丝。
灵感:
看电影长大的2001太空漫游,千钧一发,黑镜子我想创造一些我能在这些电影中看到的东西。当然,我不能创造一个飞行的机器或其他东西,我想做一些你可以在过场动画中找到的东西。这些电影中的过场动画通常涉及主角的训练或锻炼。从那时起,我开始思考未来我将在健身房看到的东西。
分解问题:
随着疫情的蔓延,许多人不得不开始在家工作。这导致了在家锻炼的热潮,因为这些人不舒服/无法进入公共健身房。这导致了许多新手和没有经验的人拿着哑铃。我就是其中之一,我养成了一个不正确的姿势的坏习惯,只有在回到公共健身房的时候我才会改正。所以,我决定创建BreakBE来帮助解决这个常见的问题。这可以在科幻电影中看到,未来的设备帮助人们锻炼。
我是如何实现它的?:
BreakBE是一款使用Arduino UNO和加速计(MPU6050)来跟踪哑铃在二头肌弯曲时的加速度的设备。然后将原始数据发送到MATLAB脚本中进行清理和绘制。加速度计只能检测到x和y方向上的相对位置(参见“我遇到的挑战”)。当一个人做了正确的二头肌卷曲时,x和y方向的加速度都很小,因此位置不会有太大的变化。然而,糟糕的姿势是一个人用动量举起重物。为了产生这个动量,这个人必须在y方向大力加速。因此,MATLAB脚本从加速度计绘制(x,y),并在y方向的位置超过阈值时停止记录。
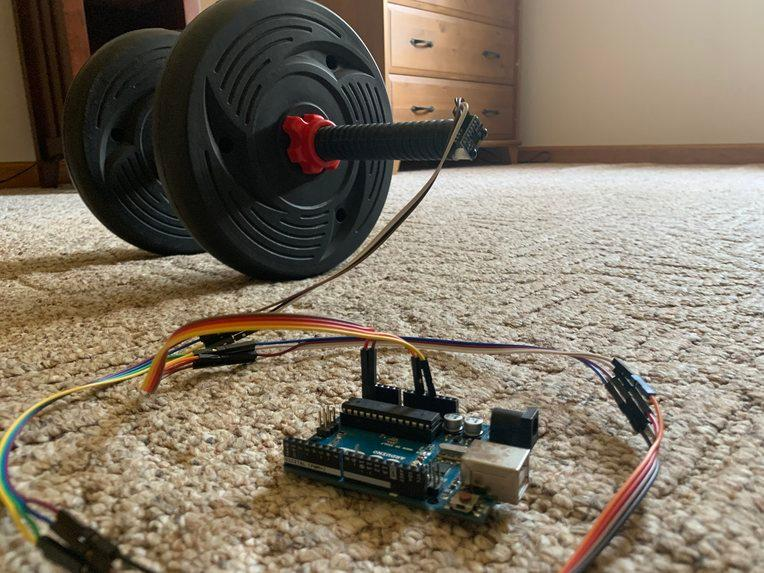
安装在MPU6050上的哑铃连接Arduino Uno
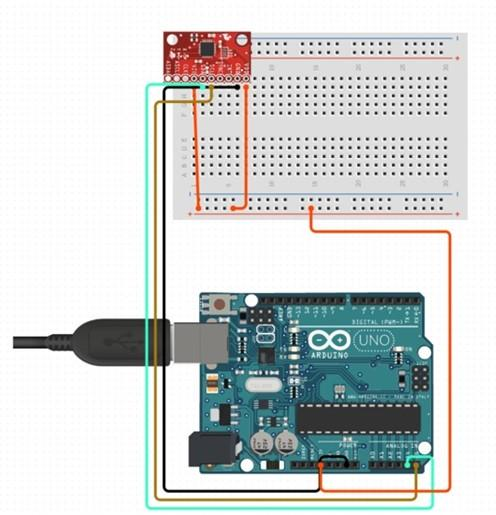
硬件连接示意图
首先,需要收集MPU6050的数据。我用了电子猫图书馆示例,它允许我从传感器收集原始数据,并通过串行监视器提交它,正如在mpu中看到的。ino (Arduino)文件(完整的程序可以在我的github库):
并同时gx);并同时“t \”);
并同时”、“);
并同时(gy);以“t \”);
一旦设备向串行监视器提交数据,我们在MATLAB脚本中收集数据:
S = serialport(“COM7”, 115200);
fopen (s);
A = fscanf(s);
b = convertCharsToStrings(a);
B = regexprep(B,“\ s +”,”);%删除空格
x = extractBefore(b,”、“);%在逗号前创建字符串x数据,因为原始数据的格式是(x,y)
y = extractAfter(b,”、“);%在逗号后面创建y数据字符串,因为原始数据的格式是(x,y)
X = str2double(X);
Y = str2double(Y);
之后,我们将数据绘制为散点图,并用一条水平线表示阈值
散射(datax datay);
线(datax datay);
yline (5“r”);%恒定水平线显示阈值
%停止并显示错误格式的文本时,y超过5(如下)
如果Yinters > 0
文本((max (datax) -100), (max (datay) -0.5),“坏形式! !”);
返回;
结束
检测到%阈值
如果Y > 5
Yinters = datay(datay==y);
Xinters = datax(datay==y);
disp (yinters);
结束
结果:
良好的形式——数据点反弹,但仍然低于虚线表示的y = 5阈值
糟糕的形式——数据点四处反弹,然后在虚线表示的y = 5阈值以上飙升
为什么我要用MATLAB?:
我第一次使用MATLAB是在两年前的一个研究项目中。我发现MATLAB在模拟那个项目的物理结构方面非常出色,可以轻松地操作数组和矩阵。在线版本让我可以轻松地在不同的电脑上工作,而不用麻烦地移动文件。代码本身非常紧凑,这是我个人非常喜欢的。对于这个项目,我想利用MATLAB的良好的绘图软件。如果我知道我想让我的情节看起来像什么,我就能实现它。与其他语言相比,该文档非常易读,因此绘图甚至更容易!
我遇到的主要收获和挑战:
问题1-我原本完全没有理解MPU6050是如何工作的。最初,我认为它能够记录位置,就像如果我把设备放在一个点上,它就可以不断地给出设备相对于起点的位置。然而,这是行不通的。来自设备的(x,y)数据给出了相对于加速度的位置。如果我保持它不动,然后移动它,它会从起始点得到(x,y)但一旦它再次变为静止,数据就回到(0,0)。所以,我必须随机应变,当加速度在y方向上变得太大时,我要检测。
问题2-我原本想用ESP32无线数据传输到电脑,这样我就不受电线距离的限制了。然而,我的ESP32坏了,输出的电压只有0.8V,不能为MPU6050供电。
总的来说,这个项目对于周末的黑客马拉松来说是很有趣的。很多方面都可以改进,比如让它无线化。此外,最好开发一个公式来确定用户判断不良形式的阈值。通过反复测试,我得到y = 5,但肯定有一种方法可以根据身高/臂长来确定。最后,如果有更好的用户界面和更多的锻炼,而不仅仅是二头肌卷曲,那就太好了。






评论
如欲留言,请点击在这里登录到您的MathWorks帐户或创建一个新帐户。