ROS工具箱
设计、模拟和部署基于ros的应用程序
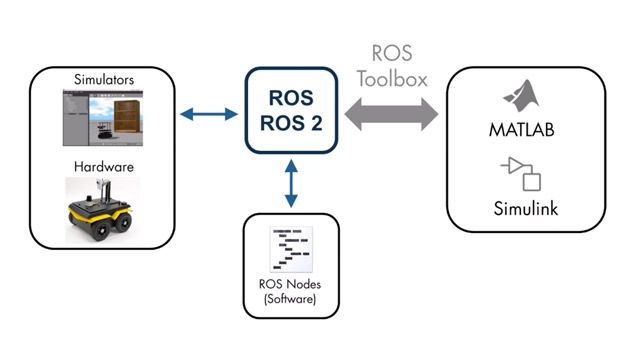
ROS工具箱提供了一个连接MATLAB的接口®和仿真软万博1manbetx件®借助Robot操作系统(ROS和ROS 2),您可以创建ROS节点网络。工具箱包括MATLAB函数和Simulink块,用于导入、分析和回放rosbag文件中记录的ROS数据。您还可以连接到实时ROS网络以访问ROS消息。万博1manbetx
工具箱可以通过桌面模拟和连接外部机器人模拟器(如Gazebo)来验证ROS节点。ROS工具箱支持c++代万博1manbetx码生成MATLAB编码器™和万博1manbetxSimulink编码器™),使您能够从Simulink模型自动生成ROS节点,并部署到模拟或物理硬件。支持Simulink外部模式允许您在模型万博1manbetx在硬件上运行时查看消息和更改参数。万博1manbetx
开始:



万博1manbetx用于订阅传感器数据和发布车轮速度的Simulink模型。

使用ROS服务和操作的客户机-服务器交互。
服务器参数
使用ROS参数服务器存储多个节点的配置选项,并启用节点的动态重新配置。

万博1manbetxSimulink模型,查询和设置ROS参数,以控制车辆齿轮选择。

从rosbag文件中选择ROS数据的工作流。
内置的消息
为您的ROS应用程序使用支持的RO万博1manbetxS消息包库。

支持的ROS消息示例。万博1manbetx
自定义消息
使用自定义消息支持为您的ROS或ROS 2应用程序添加新的消息类型。万博1manbetx

生成ROS 2自定义消息。
节点生成
为使用ROS或ROS 2功能的独立应用程序生成c++代码。

从Simulink生成独立的ROS 2节点。浏览图库(6幅图像)万博1manbetx

万博1manbetx在基于ros的模拟器上控制机器人运行的Simulink模型。