机器人系统工具箱
Entwerfen, Simulieren和Testen von Robotikanwendungen
Die Robotics System Toolbox™Bietet Tools und almulieren Zum Entwerfen,Simulieren und Testen von Manipulatoren,Mobilen Robotern und Hubotenn Robotern。FürManipulatorenundumaloide机器人enthältdie toolbox almorithmenfürdieKollinissprüfung,Die Generung von Trajektorien,Die Direkte Unverse Kinematik Sowie Die Dynamik Unter Verwendung Einer BaumstrukTurdarstellungStarrerKörper。FÜR移动机器人UMFASST SIE AlgorithmenFürIeKartenerseLung,Die Lokalisierung,Die Pfadplanung,Die Pfadverfolgung und Die Bewegungssteuerung。Die Toolbox BietetReverenzbeispieleFürGängigeAnwendungenvon Industierobotern。Außerdementhältsieeinebibliothek von ModellenFürKommerziellerhältlicheIndustieroboter,Die Sie Importieren,Visualisieren und SimulierenKönnen。
您可以给我们提供一个机器人原型机,您可以给我们提供一个运动学和动力学模型。请访问“工具箱können”,欢迎您访问“Roboteranwendungen kosimulieren”,请您直接访问“robotersimulator”。嗯,我的硬件设计验证,können,您可以通过以下方式来验证MATLAB编码器™臭臭万博1manbetxSimulink Coder™)。
Jetzt Beginnen:
请您告诉我您的特征是für Lagerrobotik和industrielle Manipulationen。

Steuerung und Simulation Mehrerer Lagerroboter在einem reverenzbeispiel。
Robotermodelle
如果你有机器人模型,你可以给我们参考häufig机器人模型,嗯,我有机器人模型。Sie können URDF-Dateien (Unified Robot Description Format)命令simscape multibody™-模型,嗯,我们可以确定机器人模型和几何图形。

拉登eines baumstrukturmodels für starre Körper aus einer Bibliothek kommerziell erhältlicher Roboter。
Modellierung和Steuerung von Bewegungen
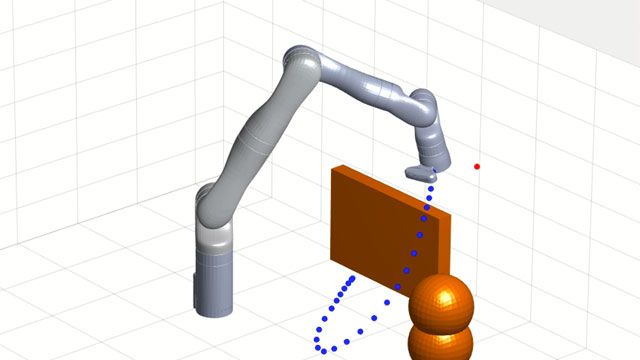
Modellieren Sie Die Grundlegende Kinematik und Dynamik von Mobilen Robotern und Hanipulatoren。Visualisieren und Simulieren Sie Roboterbewungungungengnen Zu Validieren
3 d-simulationen
您可以为我设计一个机器人模型,它具有逼真的仿真效果。请您在模拟中同步万博1manbetx®-Modellen Mit Den Gazebo-Simulateen。

Zwischen 万博1manbetxSimulink和Gazebo-Simulator同步仿真。
Manipulationsalgorithmen
您的机器人型号是:Körper。请您访问我们的网站,并给我们一个机器人模型,嗯,我有一个机器人工作流程vervollständigen。Führen Sie Kollisionsprüfungen sowie Berechnungen der inverse Kinematik and Dynamik für Ihre Robotermodelle durch。
algorithmenfür移动机器人
您可以使用移动机器人für移动机器人。
Bereitstellung Roboterhardware汪汪汪
Zeigen Sie Signale A迷人ÄndernSie参数Bereitellter Modelle。Nehmen Sie Anpassungen一个Ihren算法Vor,WährendSIEAUF硬件Ausgeführtwerden。

我的机器手算法是真正的物理机器。