使用Loop-Shaping调整锁相环的设计
这个例子展示了如何调整组件的一个被动的改善循环回路滤波器带宽的锁相环(PLL)系统。获得所需的循环频率响应,这个例子使用固定的结构优化方法计算回路滤波器参数控制系统工具箱提供的™软件。锁相环系统建模使用参考体系结构块的混合信号Blockset™图书馆。
介绍
锁相环是一个闭环系统,产生一个输出信号的相位取决于输入信号的相位。下面的图显示了一个简单的模型参考体系结构与锁相环块(整数N与单一模量预定标器锁相环(混合信号Blockset))和一个锁相环Testbench(混合信号Blockset)块。

闭环架构内的锁相环块由一个相位频率检测器(PFD),电荷泵、环路滤波器、压控振荡器(VCO)和预定标器。

混合信号Blockset库提供了多个参考体系结构块设计和模拟仿真软件锁相环系统®。万博1manbetx您可以调整的组件循环过滤(混合信号Blockset)块,这是一个无源滤波器,得到所需的开环带宽和相位。
使用控制系统工具箱软件,您可以指定所需的循环的形状固定的结构的响应和调整参数控制器来近似,循环的形状。指定所需的环形状的更多信息,参见循环稳定裕度形状和规格。在前面的锁相环结构模型中,循环过滤被定义为一个顺序固定,固定的结构控制器。实现目标回路形状,电阻的值和各回路滤波器的调谐。这样做提高了开环系统的带宽,因此,减少了测量时间锁。
设置锁相环模型
打开模型。
模型=“PLL_TuneLoopFilter”;open_system(模型)
锁相环块使用配置中指定设计和计算简单的锁相环模型(混合信号Blockset)为PFD,电荷泵,VCO,Prescalar选项卡块参数。的循环过滤标签指定了类型作为一个四阶滤波器,并设置环路带宽100 kHz和相位容限60度。电阻的值和各自动计算。
观察电流环路锁相环的动态,在块参数分析选项卡上,选择开环的分析和闭环分析。单位增益频率是100千赫。闭环系统是稳定的和3-dB带宽为128.94 kHz。


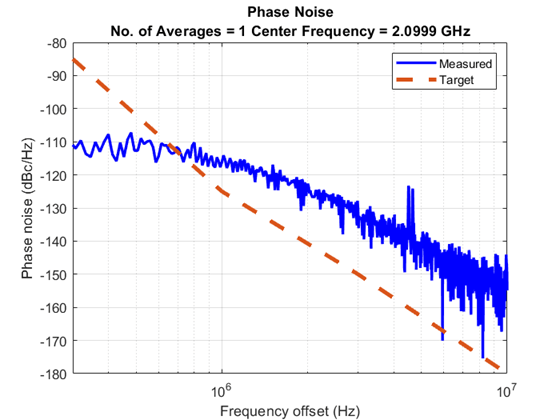
模拟模型。的锁相环Testbench块显示锁相环锁定时间和相位噪声指标。绘制和分析相位噪声概要文件,在锁相环Testbench块参数,在刺激选项卡上,选择情节相位噪声。测量锁时间是2.30微秒。
open_system([模型,/范围的])sim(模型);



定义所需的锁相环参数构建闭环系统的MATLAB®。
PllKphi = 5 e - 3;%电荷泵的输出电流PllKvco = 1 e8;% VCO的敏感性PllN = 70;%预定标器比PllR2 = 88.3;%二阶反应回路滤波器电阻(欧姆)PllR3 = 253;三阶响应%回路滤波器电阻(欧姆)PllR4 = 642;四阶响应%回路滤波器电阻(欧姆)PllC1 = 8.13平台以及;%回路滤波器直接电容(F)PllC2 = 1.48 e;%回路滤波器电容为二阶响应(F)PllC3 = 1.59平台以及;%回路滤波器电容为三阶响应(F)PllC4 = 9.21 e-11;%回路滤波器电容为四阶响应(F)
构建定制的可调系统
回路滤波器作为可调模型元素,首先创建可调标量参数(见realp)来表示每个过滤器组件。对于每个参数,定义初始值和范围。同时,指定是否可以进行调优参数。
使用电流回路滤波器电阻和电容值作为初始可调参数的数值。
%抗性R2 = realp (R2的,PllR2);R2。最小= 50;R2。最大= 2000;R2。自由= true;R3 = realp (R3的,PllR3);R3。最小= 50;R3。最大= 2000;R3。自由= true;R4 = realp (“R4”,PllR4);R4。最小= 50;R4。最大= 2000;R4。自由= true;%的功放C1 = realp (“C1”,PllC1);C1。最小值= 1 e-12;C1。最大= 1 e;C1。自由= true;C2 = realp (C2的,PllC2);C2。最小值= 1 e-12;C2。最大= 1 e;C2。自由= true;C3 = realp (“C3”,PllC3);C3。最小值= 1 e-12;C3。最大= 1 e;C3。自由= true;C4 = realp (“C4”,PllC4);C4。最小值= 1 e-12;C4。最大= 1 e;C4。自由= true;
使用这些可调参数,创建一个自定义基于回路滤波器传递函数方程的可调模型中指定的部分循环过滤(混合信号Blockset)块引用页面。loopFilterSys是一个一族模型参数化R2,R3,R4,C1,C2,C3,和C4。
A4 = C1 * C2 * C3 R3 * C4 * R2 * * R4;R3 A3 = C1 R2 * C2 * * * (C3 + C4) + C4 * R4 * (C2 * C3 * R3 + C1 R2 * C3 * R3 C2 + C1 * * + C2 * C3 * R2);A2 = C2 R2 * * (C1 + C3 + C4) + R3 * (C1 + C2) * (C3 + C4) + C4 * R4 * (C1 + C2 + C3);A1 = C1 + C2 + C3 + C4;loopFilterSys =特遣部队([R2 * C2, 1], [A4、A3、A2, A1, 0]);
利用传递函数表示在体系结构中定义的固定块(电荷泵、VCO、和预定标器),基于各自的频率响应特性[1]。
chargePumpSys =特遣部队(PllKphi, 1);%作为静态增益线性化vcoSys =特遣部队(PllKvco [1 0]);%作为积分器线性化prescalerSys =特遣部队(1 / PllN, 1);%作为静态增益线性化
为每一块定义输入和输出的名称。基于信号名称(请参阅连接元素连接)来创建一个可调闭环系统(见一族)代表锁相环结构如图所示。

chargePumpSys。InputName =“pfd_out”;%电荷泵(固定块)chargePumpSys。OutputName =“cp_out”;loopFilterSys。InputName =“cp_out”;%回路滤波器(可调块)loopFilterSys。OutputName =“lf_x”;美联社= AnalysisPoint (“X”);%分析点不会改变闭环系统的体系结构AP.InputName =“lf_x”;AP.OutputName =“lf_out”;vcoSys。InputName =“lf_out”;% VCO(固定块)vcoSys。OutputName =“vco_out”;prescalerSys。InputName =“vco_out”;%预定标器(固定块)prescalerSys。OutputName =“prescaler_out”;pfd = sumblk (“pfd_out = ref - prescaler_out”);%相位频率检测器(和块)%为闭环体系结构创建一个一族模型CL0 =连接(chargePumpSys, loopFilterSys,美联社,vcoSys prescalerSys, pdf,“ref”,“vco_out”);
Loop-Shaping设计
环路增益定义为一个频率特性数据模型提供了目标收益至少二十年,二十年以上所需的开环带宽。所需的碾轧通常较高,从而导致更高的相位噪声衰减。
指定适当的目标回路形状是这个设计的关键方面。可调补偿器是一个四阶系统与一个积分器和一个零,表示一个积分器和工厂。循环的收益必须是一个可行的目标开环结构。
调谐回路滤波器,创建一个调优目标基于目标形状指定积分作用,循环3兆赫交叉和碾轧要求40 dB /十年。目标是实施三十年低于和高于所需的开环带宽。
LoopGain =朋友([100、10、1,1依照1]的军医,2 *π* [1 e4, 1 e5、3 e6、e7 3, 3 e8]);%的朋友使用响应数据和相应的频率在rad / sLoopShapeGoal = TuningGoal.LoopShape (“X”,LoopGain);%利用AnalysisPoint位置开环响应形状测量LoopShapeGoal。专注= 2 *π* [1 e3, 1 e9];%执行目标频率范围(使用rad / s)LoopShapeGoal。Name =“环形状的目标”;%的调优目标名称MarginsGoal = TuningGoal.Margins (“X”7.6、60);MarginsGoal。专注=[0正];MarginsGoal。机会= {“X”};MarginsGoal。Name =“利润率的目标”;
观察当前的锁相环系统的开环形状参照目标回路的形状。年代代表了逆灵敏度函数和T代表了互补的灵敏度函数。默认情况下,控制系统工具箱阴谋使用rad / s为频率单位。为更多的信息关于如何改变频率单位赫兹,明白了工具箱首选项编辑器。
图viewGoal (LoopShapeGoal CL0)

使用systune调整固定的结构反馈循环。这样做计算电阻和电容值,以满足软设计目标基于目标回路的形状。运行优化算法与五种不同的初始值设置除了初始值定义在可调标量的创建真正的参数。
选择= systuneOptions ();选项。年代oftTol = 1e-5;%相对宽容终止选项。MinDecay = 1 e-12;%最低衰变速率闭环极点选项。MaxRadius = 1 e12汽油;%最大稳定动力学谱半径选项。R和omStart = 5;%许多不同的随机起始点[gHard, CL, fSoft信息]= systune (CL0, [LoopShapeGoal;MarginsGoal]、[]选项);
最后:软= 2.85,=无穷,迭代= 50最后:未能执行闭环稳定性(max再保险(s) = 3.1 e + 04)最后:未能执行闭环稳定性(max再保险(s) = 6.8 e + 04)最后:未能执行闭环稳定性(max再保险(s) = 6.2 e + 04)最后:未能执行闭环稳定性(max再保险(s) = 8 e + 04)最后:未能执行闭环稳定性(max再保险(s) = 4.9 e + 04)
systune返回调整闭环系统CL在广义状态空间形式。
算法不收敛的随机初始值,并提供一个可行的解决方案只有当电流环路滤波器组件值作为初始条件选择。调优问题更复杂,如三阶环路滤波器,该算法对初始条件的敏感程度,并随机开始探索的有效技术参数空间和收敛于一个可行的解决方案。
检查调开环形状参照目标回路的形状。观察,尽管调谐回路形状不符合目标,开环带宽增加,而循环在高频衰减保持不变。
图viewGoal (LoopShapeGoal, CL)

导出结果仿真软件模型万博1manbetx
提取调谐回路滤波器组件值。
Rtuned = [getBlockValue (CL,R2的),…getBlockValue (CL,R3的),…getBlockValue (CL,“R4”));Ctuned = [getBlockValue (CL,“C1”),…getBlockValue (CL,C2的),…getBlockValue (CL,“C3”),…getBlockValue (CL,“C4”));
调谐回路滤波器组件值写入锁相环块使用setLoopFilterValuehelper函数提供的例子。
黑色=[模型,' /整数N与单一模量预定标器的锁相环];setLoopFilterValue(黑色、Rtuned Ctuned);
观察分析开环和闭环分析情节的分析选项卡中整数N与单一模量预定标器锁相环块参数。单位增益频率和带宽3-dB显示改善,现在341.4 kHz和511.72 kHz,分别,而循环在相位噪声轮廓保持不变。


模拟模型和锁相环Testbench测量与调谐回路滤波器输出组件。
sim(模型);


引用
Banerjee[1],院长。锁相环的性能,仿真和设计。印第安纳波利斯,在:狗耳朵出版,2006年。
另请参阅
相关的例子
- 设计和计算简单的锁相环模型(混合信号Blockset)
- 循环稳定裕度形状和规格
更多关于
- 锁相环的设计和验证使用数据表规格(混合信号Blockset)