gatherLabelData
从地面实况收集同步标签数据
语法
描述
labelData= gatherLabelData (gTruth,signalNames,labelTypes)gTruth.函数返回指定信号的标签数据signalNames所指定的标签类型labelTypes.
[另外,使用前面语法中的参数返回与收集的标签数据关联的信号时间戳。labelData,时间戳= gatherLabelData(___)
使用时间戳与writeFrames函数写入关联的信号帧groundTruthMultisignal对象到磁盘。使用这些框架和相关标签作为机器学习或深度学习模型的训练数据。
[___= gatherLabelData(___“SampleFactor”,指定用于对标签数据进行子抽样的抽样因子。sampleFactor)
例子
收集标签数据并写入相关信号帧
为视频信号和激光雷达点云序列信号收集标签数据groundTruthMultisignal对象。将与该标签数据相关的信号帧写入磁盘并可视化这些帧。
将点云序列文件夹路径添加到MATLAB®搜索路径中。视频已经在MATLAB搜索路径上了。
pcSeqDir = fullfile(toolboxdir(“开车”),“drivingdata”,...“lidarSequence”);目录(pcSeqDir);
加载一个groundTruthMultisignal对象,该对象包含视频和激光雷达点云序列的标签数据。
数据=负载(“MultisignalGTruth.mat”);gTruth = data.gTruth;
指定从其中收集标签数据的信号。
signalNames = [“video_01_city_c2s_fcw_10s”“lidarSequence”];
视频包含矩形标签,而激光雷达点云序列包含长方体标签。从视频中收集矩形标签,从激光雷达点云序列中收集长方体标签。
labelTypes = [labelType.]矩形labelType。长方体];[labelData,timestamps] = gatherLabelData(gTruth,signalNames,labelTypes);
显示来自两个信号的前八行标签数据。两个信号都包含车标签。在视频中车标签被绘制为一个矩形包围框。在激光雷达点云序列中车标签绘制为长方体包围框。
videoLabelSample = head(labelData{1}) lidarLabelSample = head(labelData{2})
videoLabelSample =表车 _________________ {[ 299 213 42 33]} lidarLabelSample =表的车 ____________________________________________________ {[ 17.7444 6.7386 3.3291 3.6109 3.2214 3.5583 0 0 0]}
将与收集的标签数据相关的信号帧写入临时文件夹位置,每个信号一个文件夹。方法返回的时间戳gatherLabelData函数指示要写入哪些信号帧。
outputFolder = fullfile(tempdir,[“videoFrames”“lidarFrames”]);fileNames = writeFrames(gTruth,signalNames,outputFolder,时间戳);
从以下信号写入2帧:* video_01_city_c2s_fcw_10s * lidarSequence
加载写入的视频信号帧imageDatastore对象。控件加载关联的矩形标签数据boxLabelDatastore对象。
imds = imageDatastore(文件名{1});blds = boxLabelDatastore(labelData{1});
加载写入的激光雷达信号帧fileDatastore对象。方法加载相关的长方体标签数据boxLabelDatastore对象。
fds = fileDatastore(文件名{2},“ReadFcn”, @pcread);clds = boxLabelDatastore(labelData{2});
可视化写入的视频帧使用愿景。放像机对象。可视化写入的激光雷达帧使用pcplayer对象。
videoPlayer = vision.VideoPlayer;ptCloud =预览(fds);ptCloudPlayer = pcplayer(ptCloud.XLimits,ptCloud.YLimits,ptCloud.ZLimits);而hasdata (imd)读取视频和激光雷达帧。I = read(imds);ptCloud = read(fds);可视化视频和激光雷达帧。放像机(我);视图(ptCloudPlayer ptCloud);结束

删除点云序列文件夹的路径。
rmpath (pcSeqDir);
输入参数
输出参数
labelData-标签数据
表格的单元格数组
标签数据,返回为米——- - - - - -N表的单元格数组,其中:
米是groundTruthMultisignal对象gTruth.当
labelTypes包含ROIlabelType枚举,N信号的数量是多少signalNames以及元素的个数labelTypes.在这种情况下,labelData {m, n}控件的标签数据的表n的信号signalNames这是在米thgroundTruthMultisignal的对象gTruth.表中仅包含标签类型的标签数据n的位置labelTypes.当
labelTypes仅包含labelType。场景枚举,N等于1.在这种情况下,labelData {m}中所有信号的场景标签数据表米thgroundTruthMultisignal的对象gTruth.
对于给定的标签数据表,资源描述这张桌子大小合适T——- - - - - -l,地点:
T信号中存在标签数据的时间戳数。l为该信号收集的标签类型的标签定义的数量。台(t、l)控件收集的标签数据l标签在t时间戳。
如果其中一个信号在某个时间戳上没有标签数据,则对应的标签数据表不包含该时间戳的行。
对于表中的每个单元格,返回的标签数据的格式取决于标签的类型。
| 标签类型 | 每个时间戳标签的存储格式 |
|---|---|
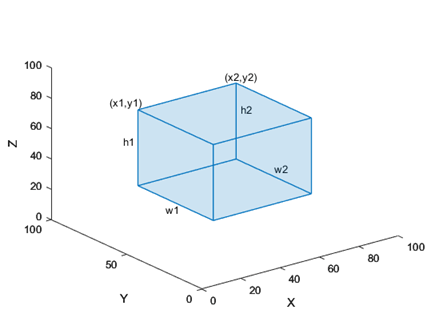
labelType。矩形 |
|
|
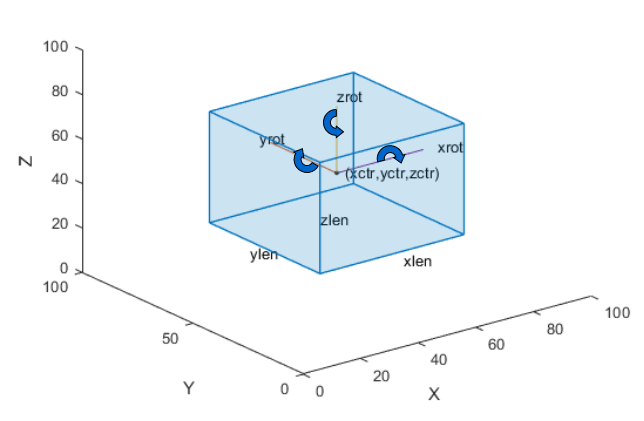
图中显示了这些值如何决定长方体的位置。
|
|
图中显示了这些值如何决定长方体的位置。
|
labelType。行 |
|
labelType。PixelLabel |
所有像素标签定义的标签数据存储在单个标签中米1 |
labelType。多边形 |
|
labelType。场景 |
逻辑1(真正的)如果应用了场景标签,否则符合逻辑0(假) |
标签数据格式
方法收集标签数据的单元格数组gatherLabelData函数。该函数从三个方面收集标签groundTruthMultisignal具有变量名的对象gTruth1,gTruth2,gTruth3.
为视频信号命名
video_front_camera,函数收集类型的标签矩形而且行.用于激光雷达点云序列信号存储在一个名为
lidarData,函数收集类型的标签长方体.
方法的调用gatherLabelData函数。
labelData = gatherLabelData([gTruth1 gTruth2 gTruth3],...[“video_front_camera”,...“lidarData”),...{[labelType。矩形labelType。线),...labelType.Cuboid};
labelData输出是一个3 × 2的表格单元格数组。单元格数组的每行包含其中一个的标签数据groundTruthMultisignal对象。第一列包含视频信号的标签数据,video_front_camera.第二列包含点云序列信号的标签数据,lidarData.这张图显示了labelData单元阵列。

该图显示了第三个视频信号的标签数据表groundTruthMultisignal对象。的gatherLabelData函数收集数据矩形标签命名车和一个行标签命名车道.该表包含信号中四个时间戳的标签数据。

该图显示了第三个激光雷达信号的标签数据表groundTruthMultisignal对象。的gatherLabelData函数收集数据长方体标签,也叫车.的车标签出现在两种信号类型中,因为它被标记为矩形视频信号标签和一个长方体激光雷达信号标签。该表包含信号中四个时间戳的标签数据。

时间戳-信号时间戳
单元格阵列持续时间向量
信号时间戳,返回为米——- - - - - -N单元格阵列持续时间向量,地点:
米是groundTruthMultisignal对象gTruth.N信号的数量是多少signalNames.labelData {m, n}控件的时间戳n的信号signalNames这是在米thgroundTruthMultisignal的对象gTruth.
如果从多个信号中收集标签数据,则信号时间戳将与指定的第一个信号的时间戳同步signalNames.
限制
的
gatherLabelData函数不为子标签或属性收集标签数据。如果标签包含子标签或属性,则在labelData输出时,函数只返回父标签的位置。
版本历史
您也可以从以下列表中选择一个网站: