概率假设密度(博士)追踪

库:
传感器融合和跟踪工具箱/多目标跟踪算法
描述
的概率假设密度(博士)追踪块创建并管理静止和移动对象的轨迹在多传感器环境中。跟踪器使用多目标概率假设密度滤波来估计状态的点目标和扩展对象。博士是由概率密度函数的加权求和,提取和山峰博士代表可能的目标。看到算法为更多的细节。

港口
输入
输出
参数
算法
概率假设密度
概率假设密度(博士)是一个函数定义的状态跟踪系统,和它的价值在一个状态被定义为预期的目标状态空间体积单位的数量。博士通常近似的组件,每个组件和对应于估计的状态。博士的常用近似高斯混合,SMC混合物,GGIW混合物,GIW混合物。
要理解博士,以高斯混合为一个例子。高斯混合可以用
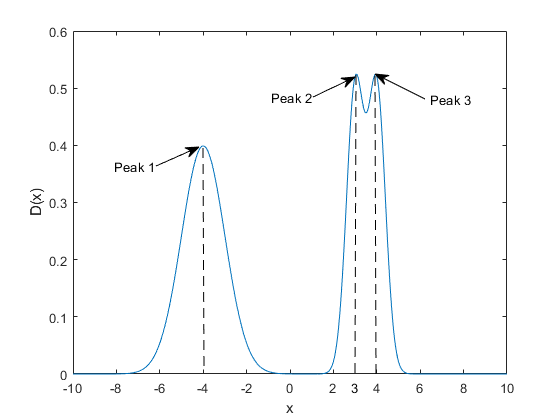
在哪里米组件的总数,N(x|米我,P我)是一个正态分布的意思米我和协方差P我,w我的重量吗我组件。重量w我表示数量,可分数所代表的目标我组件。集成的D(x)对非整数地区结果的预期目标。集成D(x)在整个状态空间结果的总预期目标(∑w我),因为一个正态分布的集成在整个状态空间是1。的x坐标的山峰(本地最大值)D(x)代表了最有可能的目标。
例如,下图展示了一个博士给出的函数D(x)=N(x|−4,2)+ 0.5N(x| 3、0.4)+ 0.5N(x| 4,0.4)。这些组件的重量总和是2,这意味着两个目标可能存在。的山峰D(x),这些目标的可能位置x=−4,x= 3,x= 4。注意最后两个组件是非常接近对方,这意味着这两个组件可能归因于一个对象。
引用
[1]Granstorm, K。,C。Lundquiest, and O. Orguner. " Extended target tracking using a Gaussian-mixture PHD filter."IEEE航空航天和电子系统。48卷,4号,2012年,页3268 - 3286。
[2]Granstorm, K。,O. Orguner." A PHD filter for tracking multiple extended targets using random matrices."IEEE信号处理。60卷,11号,2012年,页5657 - 5671。
[3]Granstorm, K。,A. Natale, P. Braca, G. Ludeno, and F. Serafino."Gamma Gaussian inverse Wishart probability hypothesis density for extended target tracking using X-band marine radar data."IEEE地球科学和遥感。53卷,12号,2015年,页6617 - 6631。
[4]附近潘塔,译注),et al . "数据关联和跟踪管理高斯混合概率假设密度滤光片。”IEEE航空航天和电子系统,45卷,不。3、2009年7月,页1003 - 16。
[5]Ristic B。,et al. “Adaptive Target Birth Intensity for PHD and CPHD Filters.”IEEE航空航天和电子系统,48卷,不。2,2012年,页1656 - 68。