在密集杂波跟踪点目标在仿真软件中使用GM-PHD追踪万博1manbetx
一般雷达接收回声信号路径的所有表面。这些多余的反向散射信号或回声产生物理对象被称为杂乱。在密集杂乱的环境中,错过了检测和假警报使跟踪对象的一个具有挑战性的任务等传统追踪全球加权(GNN)追踪。在这样一个环境中追踪博士提供了更好的评估的对象,因为它可以处理多个检测/对象/传感器没有集群第一个吃螃蟹的人。这个例子向您展示了如何在密集杂波跟踪点目标使用高斯混合概率假设密度(GM-PHD)以一个恒定的速度跟踪模型在仿真软件。万博1manbetx密切遵循的例子使用GM-PHD跟踪器跟踪点目标密集杂乱MATLAB®的例子。
模型的概述
load_system (“TrackPointTargetsInDenseClutter万博1manbetxSimulinkExample”);set_param (“TrackPointTargetsInDenseClutter万博1manbetxSimulinkExample”,“SimulationCommand”,“更新”);open_system (“TrackPointTargetsInDenseClutter万博1manbetxSimulinkExample”);
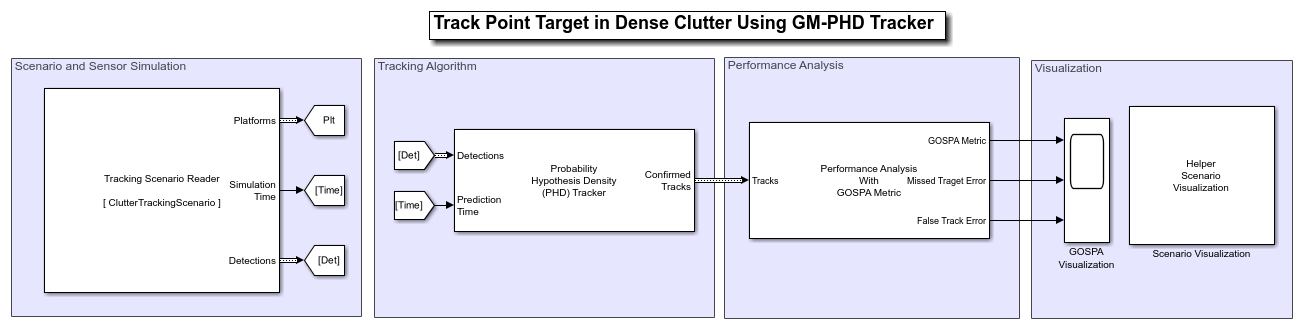
模型包括四个部分,每一个实现工作流的一部分:
模拟场景和传感器
跟踪算法
性能分析
可视化
模拟场景和传感器
在这个例子中使用创建的场景trackingScenario。5点的场景由匀速运动目标。您使用fusionRadarSensor模拟雷达探测的场景。视场内的目标移动的传感器。您使用FalseAlarmRate属性的传感器来控制混乱的密度。的值FalseAlarmRate产权代表的概率生成假警报在一个分辨单元的传感器。基于的误警率1 e - 3和传感器的分辨率定义在这个例子中,大约有53个假警报生成的每一步。这个例子的场景是在帮助文件中定义helperCreateClutterTrackingScenario。您使用跟踪场景读者块从工作区中读取对象的场景。你配置块输出检测平台构成和仿真时间。块的输出构成和检测平台万博1manbetxSimulink.Bus(万博1manbetx模型)对象。
![]()
跟踪算法
在这个例子中使用概率假设密度(博士)追踪块的gmphd过滤器来跟踪目标。第一步配置跟踪博士是定义传感器的配置。你定义传感器的配置结构字段一样trackingSensorConfiguration。你设置SensorIndex配置1匹配的索引模拟传感器。的传感器是一个点对象传感器输出最多每扫描一检测对象,设置MaxNumDetsPerObject的配置为1。你认为所有跟踪检测,因此,SensorTransformFcn被定义为@ x (x, params)和SensorLimits被定义为(负无穷到正无穷)所有国家。你定义ClutterDensity在配置领域,它是指传感器的误警率单位体积。你设置FilterInitializationFcn来initcvgmphd,创建一个常速GM-PHD过滤器。你指定新目标的出生率从块面具定义预期数量的目标出现在单位时间内的视野。代码创建传感器配置中定义的helper函数helperCreateSensorConfig。你调用这个函数PreLoadFcn回调。看到模型的回调(万博1manbetx模型)关于回调函数的更多信息。
![]()
性能分析

评估跟踪器的性能,您可以使用广义优化子模式的任务指标块。GOSPA度量旨在评估跟踪器的性能使用单一的组合得分作业中的错误和距离。GOSPA度量可以由以下公式计算:

在哪里 地面真理和数量吗
地面真理和数量吗 是估计的数量。
是估计的数量。 截止距离阈值,然后呢
截止距离阈值,然后呢 是距离跟踪和真理中指定一个距离函数计算了
是距离跟踪和真理中指定一个距离函数计算了距离财产。 是度量和订单吗
是度量和订单吗 度规的α参数,定义块面具。
度规的α参数,定义块面具。
降低GOSPA成本代表更好的跟踪性能。值0表示一个完美的跟踪。启用错过目标误差和错误跟踪误差GOSPA指标作为块输出组件和可视化。之前传递真实信息GOSPA度量阻止你把传感器平台真相的信息。要做到这一点,你用辅助过滤器传感器平台辅助块,实现使用MATLAB函数(万博1manbetx模型)块。
可视化
在这个例子中GOSPA度量使用范围块和可视化场景可视化使用场景可视化块。场景可视化实现块使用MATLAB系统(万博1manbetx模型)块。代码块中定义的helper类helperClutterTrackingDisplayBlock。块使用RunTimeObject参数块来显示他们的输出。看到在模拟块数据的访问(万博1manbetx模型)为进一步的信息关于如何访问块在模拟输出。

注意,几步后GOSPA指标降低。GOSPA指标较高的初始值为每个跟踪由于建立延迟。GOSPA度量结果表明GM-PHD追踪人口凌乱的场景中表现良好和零误报零错过了追踪。
close_system (“TrackPointTargetsInDenseClutter万博1manbetxSimulinkExample”);
总结
在这个示例中,您了解了如何使用一个博士在密集杂波跟踪器跟踪点对象模型。万博1manbetx您还了解了如何使用GOSPA跟踪算法的性能评估指标及其相关组件。仿真结果表明,GM-PHD追踪不错过目标或创建假警报。降低总体GOSPA分数也表示满意的跟踪性能。