trackingScenario
创建跟踪场景
描述
trackingScenario创建一个跟踪场景对象。跟踪场景模拟一个包含多个平台的3d竞技场。平台代表您想要模拟的任何东西,如飞机、地面车辆或船只。一些平台携带传感器,如雷达、声纳或红外。其他平台充当信号的来源或反映信号。平台也可以包括可以影响其他平台运动的静止障碍。可以将平台建模为点或长方体“维度”属性时调用平台.平台可以具有方面相关的特性,包括雷达横截面或声纳目标强度。方法来填充跟踪场景平台方法为您想添加的每个平台平台对象。可以为任何平台创建轨迹kinematicTrajectory,waypointTrajectory,或geoTrajectory系统对象。创建场景后,通过调用推进对象的功能。
创建
sc = trackingScenario创建一个带有默认属性值的空跟踪场景。在本例中,您可以将场景中的平台轨迹指定为笛卡尔状态kinematicTrajectory或waypointTrajectory对象。
sc = trackingScenario(' isearthcentric ',创建一个带有默认属性值的空地球中心跟踪场景。方法将场景中的平台轨迹指定为大地状态真正的)geoTrajectory对象。
sc= trackingScenario (名称,值)trackingScenario使用一个或多个属性的名称,值对参数。的名字属性名和价值对应的值。的名字必须出现在单引号内('').可以以任意顺序指定多个名值对参数Name1, Value1,…,的家.任何未指定的属性都采用默认值。
属性
对象的功能
平台 |
为跟踪场景添加平台 |
推进 |
提前跟踪场景模拟一个时间步长 |
重新启动 |
重新启动跟踪场景模拟 |
记录 |
运行跟踪场景并记录平台、传感器和发射器信息 |
发出 |
在跟踪场景中收集排放者的排放物 |
传播 |
在跟踪场景中传播排放 |
检测 |
收集跟踪场景中所有传感器的检测结果 |
lidarDetect |
报告所有激光雷达传感器探测到的点云trackingScenario |
platformPoses |
跟踪场景中所有平台的位置、速度和方向 |
platformProfiles |
跟踪场景下的平台配置文件 |
coverageConfig |
传感器和发射器覆盖配置 |
克隆 |
创建跟踪场景的副本 |
扰乱 |
在跟踪场景中应用摄动 |
例子
创建两个平台的跟踪场景
用遵循不同轨迹的两个平台构建一个跟踪场景。
sc = trackingScenario(“UpdateRate”, 100.0,“StopTime”, 1.2);
创建两个平台。
Platfm1 =平台(sc);Platfm2 =平台(sc);
1号站台沿着半径为10米的圆形路径运行1秒。这是通过将路径点放置为圆形来实现的,确保第一个和最后一个路径点是相同的。
Wpts1 = [0 10 0;10 0 0;0 -10 0;-10 0 0;0 10 0];Time1 = [0;0.25;5;综合成绩;1.0); platfm1.Trajectory = waypointTrajectory(wpts1, time1);
2号站台沿直线行驶1秒。
wpst2 = [-8 -8 0;10 10 0];Time2 = [0;1.0);platfm2。轨迹= waypointTrajectory(wpts2,time2);
验证场景中的平台数量。
disp (sc.Platforms)
{1×1 fusion.scenario。平台} {1×1 fusion.scenario.Platform}
运行模拟并绘制每个平台的当前位置。使用动画线来绘制每个平台的位置。
图网格轴平等的轴([-12 12 -12 12])line1 = animatedline(“DisplayName的”,“轨道1”,“颜色”,“b”,“标记”,“。”);Line2 = animatedline(“DisplayName的”,《轨道2》,“颜色”,“r”,“标记”,“。”);标题(“轨迹”) p1 = pose(platfm1);P2 = pose(platfm2);addpoints (line1 p1.Position (1) p1.Position (2));addpoints (line2, p2.Position (2), p2.Position (2));而Advance (sc) p1 = pose(platfm1);P2 = pose(platfm2);addpoints (line1 p1.Position (1) p1.Position (2));addpoints (line2, p2.Position (2), p2.Position (2));暂停(0.1)结束
![]()
标出两个平台的路径点。
持有在情节(wpts1 (: 1) wpts1 (:, 2),“ob”)文本(wpts1 (: 1) wpts1 (:, 2),"t = "+字符串(time1),“HorizontalAlignment”,“左”,“VerticalAlignment”,“底”)情节(wpts2 (: 1) wpts2 (:, 2),”或“)文本(wpts2 (: 1) wpts2 (:, 2),"t = "+字符串(time2),“HorizontalAlignment”,“左”,“VerticalAlignment”,“底”)举行从
![]()
创建以地球为中心的场景
创建一个具有指定更新速率的跟踪场景。
scene = trackingScenario(“IsEarthCentered”,真的,“UpdateRate”, 0.01);
在场景中添加一架飞机。飞机的飞行轨迹随纬度和高度的变化而变化。
平面=平台(场景,“轨迹”geoTrajectory((-12.338, -71.349, 10600; 42.390, -71.349, 0], 36000年[0]));
提出跟踪方案,记录平面目标的大地位置和笛卡尔位置。
位置= [];而(场景)(平面)“CoordinateSystem”,“大地”);poseCart = pose(平面,“CoordinateSystem”,笛卡儿的);position = [position;poseCart.Position];%#ok允许缓冲区增长 结束
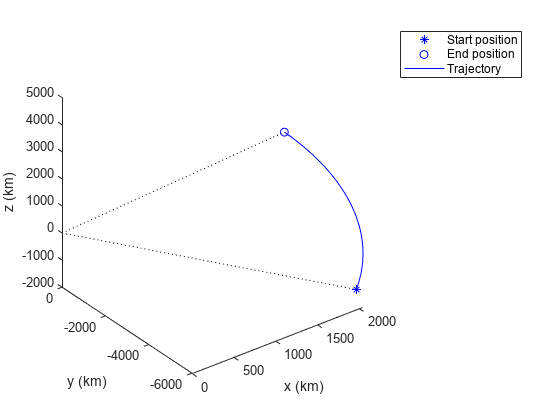
在ECEF坐标系中可视化轨迹。
图()km = 1000;画出轨迹。plot3(职位(1,1)/公里,位置(1、2)/公里,位置(1、3)/公里," b *’);持有在;plot3(职位(结束,1)/公里,位置(,2)/公里,位置(结束,3)/公里,“波”);plot3(职位(:1)/公里,位置(:,2)/公里,位置(:,3)/公里,“b”);绘制地球径向线。plot3([0位置(1,1)]/公里,[0位置(1、2)]/公里,[0位置(1、3)]/公里,凯西:”);图3([0个位置(终点,1)]/km,[0个位置(终点,2)]/km,[0个位置(终点,3)]/km,凯西:”);包含(“x(公里));ylabel (“y”(公里));zlabel (“z(公里)”);传奇(“起始位置”,“结束位置”,“轨迹”)
兼容性的考虑
您也可以从以下列表中选择网站: