运动学
速率驱动轨迹发生器
描述
这个运动学系统对象™使用指定的加速度和角速度生成轨迹。
要根据速率生成轨迹,请执行以下操作:
创建
运动学对象并设置其属性。使用参数调用对象,就像调用函数一样。
要了解有关系统对象如何工作的更多信息,请参见什么是系统对象?.
创建
属性
用法
语法
描述
[输出轨迹状态,然后根据轨迹状态进行更新位置,方向,速度,加快,angularVelocity]=轨迹(bodyAcceleration,bodyAngularVelocity)bodyAcceleration和bodyAngularVelocity.
此语法仅在以下情况下有效:角速度源设置为“输入”和AccelerationSource设置为“输入”.
[输出轨迹状态,然后根据轨迹状态进行更新位置,方向,速度,加快,angularVelocity]=轨迹(bodyAngularVelocity)体角加速度.
此语法仅在以下情况下有效:角速度源设置为“输入”和AccelerationSource设置为“属性”.
[输出轨迹状态,然后根据轨迹状态进行更新位置,方向,速度,加快,angularVelocity]=轨迹(bodyAcceleration)bodyAcceleration.
此语法仅在以下情况下有效:角速度源设置为“属性”和AccelerationSource设置为“输入”.
[输出轨迹状态,然后更新轨迹状态。位置,方向,速度,加快,angularVelocity] =轨迹()
此语法仅在以下情况下有效:角速度源设置为“属性”和AccelerationSource设置为“属性”.
输入参数
输出参数
目标函数
例子
创建默认值运动学
创建默认值运动学系统对象™ 并探索输入、属性和生成轨迹之间的关系。
轨迹=运动轨迹
[0 0] Position: [0 0] Orientation: [1x1 quaternion] Velocity: [0 00] AccelerationSource: 'Input' AngularVelocitySource: 'Input'
默认情况下,运动学物体的初始位置为[0 0 0],初始速度为[0 0 0]。方位用四元数(1 + 0i + 0j + 0k)来描述。
这个运动学对象在属性中保持可见和可写状态位置,速度和方向.当您调用对象时,将输出状态并更新。
例如,通过指定相对于身体坐标系的加速度和角速度来调用对象。
车身加速度=[5,5,0];车身角速度=[0,0,1];[位置、方向、速度、加速度、角速度]=轨迹(车身加速度、车身角速度)
位置=1×30 0 0
定向=四元数1 + 0i + 0j + 0k
速度=1×30 0 0
加速=1×35 5 0
angularVelocity =1×30 0 1
从输出的位置、方向和速度弹道对象对应于属性在调用对象之前报告的状态。这个弹道状态在被调用后更新,并且可以从属性中观察到:
弹道
轨迹= kinematicTrajectory with properties: SampleRate: 100 Position: [2.5000e-04 2.5000e-04 0] Orientation: [1x1 quaternion] Velocity: [0.0500 0.0500 0] AccelerationSource: 'Input'
这个加快和angularVelocity的输出弹道对象对应于bodyAcceleration和bodyAngularVelocity,但它们是在导航坐标系中返回的。使用方向要旋转的输出加快和angularVelocity到物体坐标系,并验证它们近似等价于bodyAcceleration和bodyAngularVelocity.
旋转加速度=旋转点(方向、加速度)
旋转加速度=1×35 5 0
旋转角度速度=旋转点(方向,角度速度)
旋转角速度=1×30 0 1
这个运动学系统对象™可以通过属性修改轨迹状态。将位置设置为[0,0,0],然后在物体坐标系中以指定的加速度和角速度调用对象。为说明目的,克隆弹道对象,然后再修改位置属性。调用这两个对象并观察位置是否有差异。
trajectoryClone =克隆(轨迹);轨迹。位置= [0,0,0]; position = trajectory(bodyAcceleration,bodyAngularVelocity)
位置=1×30 0 0
clonePosition=轨迹Clone(车身加速度、车身角度速度)
克隆定位=1×310-3× 0.2500 0.2500 0
创建振荡轨迹
此示例演示如何使用创建沿本地NED坐标系的北轴振荡的轨迹运动学系统对象™.
创建默认值运动学对象。默认初始方向与本地坐标系对齐。
traj=运动轨迹
traj=具有属性的运动学轨迹:采样器:100位置:[0]方向:[1x1四元数]速度:[0]加速度源:'Input'角度速度源:'Input'
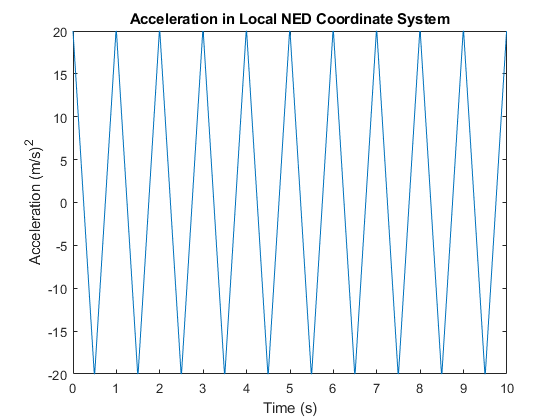
定义持续时间为10秒的轨迹,包括围绕东轴旋转(俯仰)和沿本地NED坐标系的北轴振荡。使用默认值运动学采样率。
fs=traj.采样器;持续时间=10;numSamples=持续时间*fs;周期秒=1;samplesPerCycle=fs/周期秒;numCycles=ceil(numSamples/samplesPerCycle);maxAccel=20;三角形=[linspace(maxAccel,1/fs maxAccel,samplesPerCycle/2),...linspace (-maxAccel maxAccel - (1 / fs), samplesPerCycle / 2)];振荡= repmat(三角形numCycles 1);振荡=振荡(1:numSamples);accNED = [0 (numSamples, 2),振动);angVelNED = 0 (numSamples, 3);angVelNED(:, 2) = 2 *π;
绘制加速度控制信号。
时间向量=0:1/fs:(持续时间-1/fs);图(1)绘图(时间向量,振荡)xlabel(‘时间’)伊拉贝尔('加速度(m/s)^2')头衔(“本地坐标系中的加速度”)
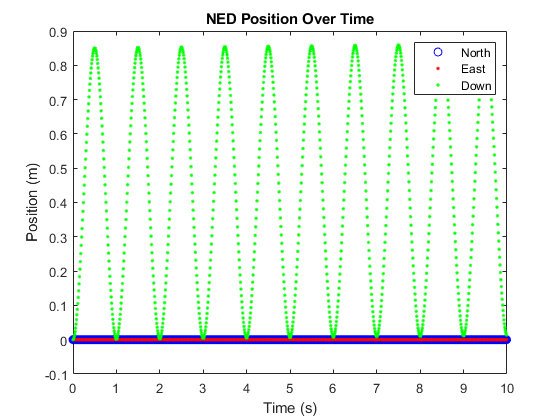
在循环中逐样本生成轨迹样本运动学System object假定加速度和角速度输入在局部传感器体坐标系中。使用将加速度和角速度控制信号从NED坐标系旋转到传感器体坐标系旋转场和方向状态。每次更新位置的3-D图。添加暂停模拟实时处理。一旦循环完成,绘制位置随时间的变化。旋转意外和angVelNED发送到局部身体坐标系的控制信号确保运动沿下轴进行。
图(2)plotHandle = plot3(traj.Position(1),traj.Position(2),traj.Position(3),“波”);网格在…上xlabel(“北方”)伊拉贝尔(“东方”)兹拉贝尔(“向下”)轴([-11-1011.5])保持在…上q=一(numSamples,1,“四元数”);对于ii=1:numSamples accBody=rotateframe(平移方向,accNED(ii,:);angVelBody=rotateframe(平移方向,angveled(ii,:);[pos(ii,:),q(ii),vel,ac]=traj(accBody,angVelBody);set(plotHandle,“扩展数据”,位置(ii,1),“伊达塔”,位置(ii,2),“ZData”,位置(ii,3))暂停(1/fs)终止图(3)绘图(时间向量,位置(:,1),“波”,...时间向量,位置(:,2),“r.”,...时间向量,位置(:,3),“g”。)xlabel(‘时间’)伊拉贝尔(‘位置(m)’)头衔(“随时间变化的NED位置”)传说(“北方”,“东方”,“向下”)

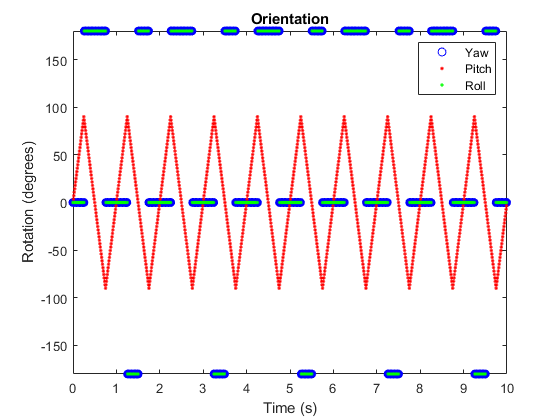
将记录的方向转换为欧拉角并绘图。虽然平台的方向随时间变化,但加速度始终沿北轴作用。
图(4)eulerAngles=eulerd(q,“ZYX”,“框架”);绘图(时间向量,欧拉曲线(:,1),“波”,...时间向量,欧拉格(:,2),“r.”,...timeVector eulerAngles (: 3)“g”。)轴([0,持续时间,-180180])图例(“偏航”,“投球”,“滚”)xlabel(‘时间’)伊拉贝尔(的旋转(度))头衔(“方向”)
生成一个线圈轨迹
此示例显示如何使用运动学系统对象™.
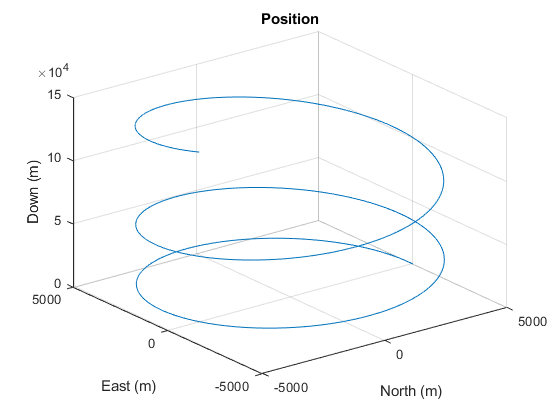
创建持续时间为1000秒、采样率为10 Hz的圆形轨迹。将圆形半径设置为5000米,速度设置为80米/秒。将爬升速率设置为100米/秒,将俯仰设置为15度。指定指向运动方向的初始方向。
持续时间=1000;%秒fs=10;%赫兹N=持续时间*fs;%样本数半径=5000;%米速度=80;%米每秒上升率=50;%米每秒initialYaw = 90;%学位螺距=15;%学位initPos=[半径,0,0];initVel=[速度,爬坡率];initOrientation=四元数([初始偏航,俯仰,0],“欧勒德”,“zyx”,“框架”);轨迹= kinematicTrajectory (“SampleRate”,财政司司长,...“速度”,initVel,...“位置”,initPos,...“方向”, initOrientation);
在躯干坐标系中指定恒定加速度和角速度。旋转躯干框架以考虑俯仰。
accBody=0(N,3);accBody(:,2)=速度^2/半径;accBody(:,3)=0.2;angVelBody=0(N,3);angVelBody(:,3)=速度/半径;俯仰旋转=四元数([0,俯仰,0],“欧勒德”,“zyx”,“框架”);angVelBody = rotateframe (pitchRotation angVelBody);accBody = rotateframe (pitchRotation accBody);
呼叫弹道在身体坐标系中具有指定的加速度和角速度。绘制随时间变化的位置、方向和速度。
[位置、方向、速度]=轨迹(accBody、angVelBody);eulerAngles=eulerd(方向、,“ZYX”,“框架”);速度=sqrt(和(速度^2,2));时间向量=(0:(N-1))/fs;图(1)绘图3(位置(:,1),位置(:,2),位置(:,3))xlabel("北(m)")伊拉贝尔("东(m)")兹拉贝尔(‘向下(m)’)头衔(“位置”网格)在…上
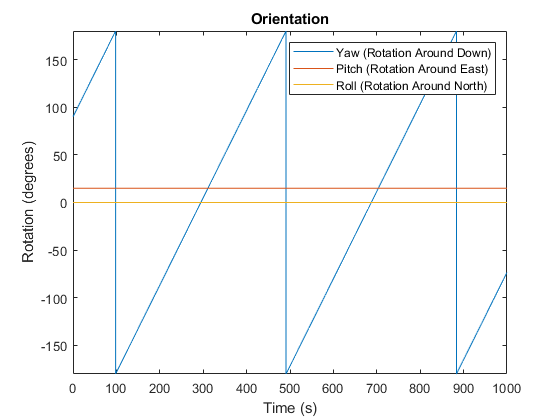
图(2)绘图(时间向量,欧拉曲线(:,1),...时间向量,欧拉格(:,2),...时间向量,欧拉曲线(:,3))轴([0,持续时间,-180180])图例(“偏航(旋转四周向下)”,'俯仰(绕东旋转)',“Roll(绕北旋转)”)xlabel(‘时间’)伊拉贝尔(的旋转(度))头衔(“方向”)
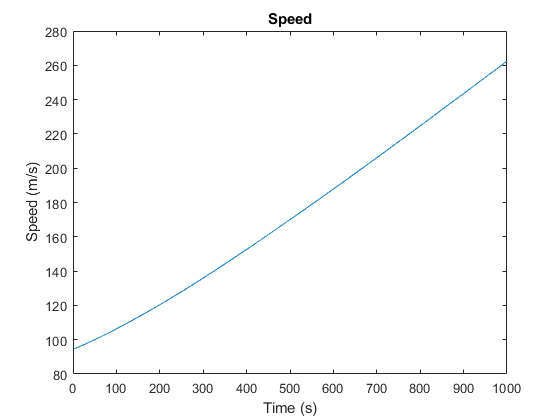
图(3)绘图(时间矢量、速度)xlabel(‘时间’)伊拉贝尔(‘速度(米/秒)’)头衔(“速度”)
生成无输入的螺旋圆形轨迹
定义描述螺旋圆形轨迹的恒定角速度和恒定加速度。
Fs=100;r=10;速度=2.5;初始偏航=90;初始位置=[r 0];初始水平=[0速度0];初始方向=四元数([初始偏航0],“欧勒德”,“ZYX”,“框架”);accBody=[0速度^2/r 0.01];angVelBody=[0速度/r];
创建运动轨迹对象。
traj=运动轨迹(“SampleRate”,财政司司长,...“位置”,initPos,...“速度”,initVel,...“方向”,东方,...“AccelerationSource”,“属性”,...“加速”accBody,...“AngularVelocitySource”,“属性”,...“AngularVelocity”,angVelBody);
在循环中调用运动学轨迹对象并记录位置输出。绘制随时间变化的位置。
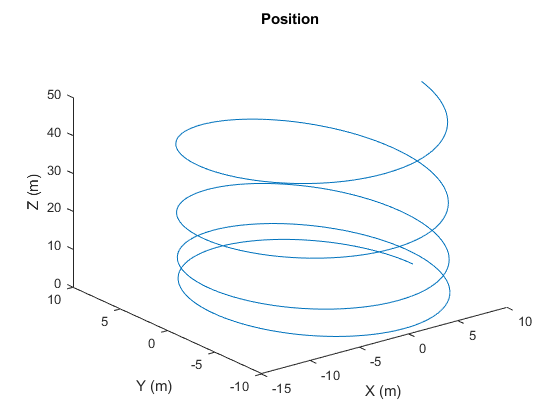
N=10000;pos=0(N,3);对于i = 1:N pos(i,:) = traj();终止图3(位置(:,1),位置(:,2),位置(:,3))标题(“位置”)xlabel(‘X(m)’)伊拉贝尔(‘Y(m)’)兹拉贝尔(‘Z(m)’)
扩展功能
您还可以从以下列表中选择网站: