tracking.scenario.airplaneMesh
网格表示的飞机
描述
网= tracking.scenario.airplaneMeshextendedObjectMesh飞机对象定义一个网格,可以使用的trackingScenario对象。
例子
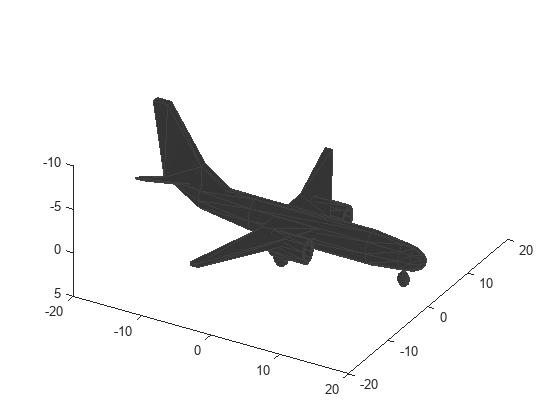
创造和想象飞机网
创建飞机网。
网= tracking.scenario.airplaneMesh;
可视化网格。
ax =轴(“ZDir”,“反向”);显示(网、ax);视图(30、50);
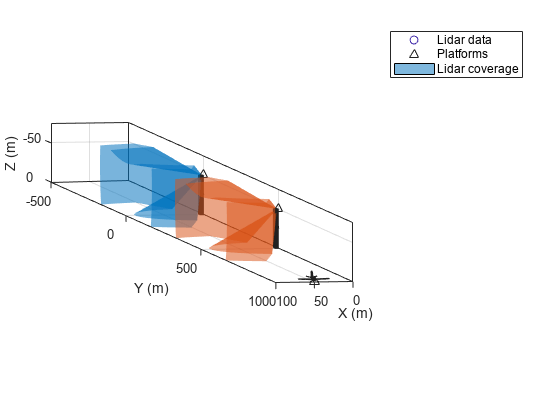
模拟激光雷达探测飞机网
创建一个跟踪场景对象和飞机网格对象。
现场= trackingScenario;网= tracking.scenario.airplaneMesh;
创建两个塔平台。
%创建第一个塔。塔=平台(现场);h = 50;tower.Trajectory。位置= [0 0 - h];塔。尺寸=结构(“长度”10“宽度”10“高度”h,“OriginOffset”,0 0 - h / 2);塔。传感器= monostaticLidarSensor (“SensorIndex”,1…“MaxRange”,200,…“之内”,真的,…“DetectionCoordinates”,“场景”,…“AzimuthLimits”(-75 75),…“ElevationLimits”[-10]30日);%创建第二个塔。tower2 =平台(现场);h = 50;tower2.Trajectory。位置= [0 500 - h];tower2。尺寸=结构(“长度”10“宽度”10“高度”h,“OriginOffset”,0 0 - h / 2);tower2。传感器= monostaticLidarSensor (“SensorIndex”2,…“MaxRange”,200,…“之内”,真的,…“DetectionCoordinates”,“场景”,…“AzimuthLimits”(-75 75),…“ElevationLimits”[-10]30日);
创建飞机目标与网有关。
飞机=平台(现场);飞机。网=网;%设置平面的尺寸,自动调整网格的大小。飞机。尺寸=结构(“长度”现年40岁的…“宽度”现年40岁的…“高度”,12.5,…“OriginOffset”,0 0 12.5 / 2);
创建一个着陆轨迹的平面。
x = 50 *的(10 - 1);y = linspace (-500、1000、10) ';yToLand = max (0, - y);z = 1 e4 * (2。* (yToLand. / 50 e3)。^ 3 + 3 * (yToLand. / 50 e3) ^ 2);wps = [x y z];30岁的toa = linspace (0 10) ';traj = waypointTrajectory (wps, toa);飞机。轨迹= traj;
创建一个绘图机可视化的场景。
lp = scatter3(南南,南南,6日,“o”,“DisplayName的”,激光雷达数据的);tp = theaterPlot (“父”lp.Parent,…“XLimits”100年[0],…“YLimits”(-500 1000),…“ZLimits”,-75年[0]);lp.Parent。ZDir =“反向”;视图(lp.Parent 169 5);页= platformPlotter (tp,“DisplayName的”,“平台”,“标记”,“^”);cp = coveragePlotter (tp,“DisplayName的”,激光雷达覆盖的);持有在;
推进仿真,生成数据,可视化结果。
现场。UpdateRate = 0;%自动更新率而推进(场景)%产生点云。ptCloud = lidarDetect(现场);%获得覆盖配置。cfg = coverageConfig(现场);%的阴谋报道。cp.plotCoverage (cfg);%绘制平台。platPoses = platformPoses(现场);pos = vertcat (platPoses.Position);网= cellfun (@ (x) x.Mesh scene.Platforms);东方= vertcat (platPoses.Orientation);pp.plotPlatform (pos、网、东方);%连接所有点云。s = vertcat (ptCloud {:});%绘制激光雷达数据。集(lp),“XData”年代(:1),…“YData”s (:, 2),…“ZData”年代(:3),…CData的年代(:3));drawnow;结束
输出参数
版本历史
介绍了R2020b