主要内容
传感器型号
IMU,GPS,雷达,ESM和EO / IR
型号各种传感器,包括:IMU(加速度计,陀螺仪,磁力计),GPS接收器,高度计,雷达,LIDAR,声纳和IR。您可以通过修改传感器模型的参数来模拟环境,通道和传感器配置。对于活动传感器,您还可以将相应的发射器和通道绘制为单独的对象。
功能
话题
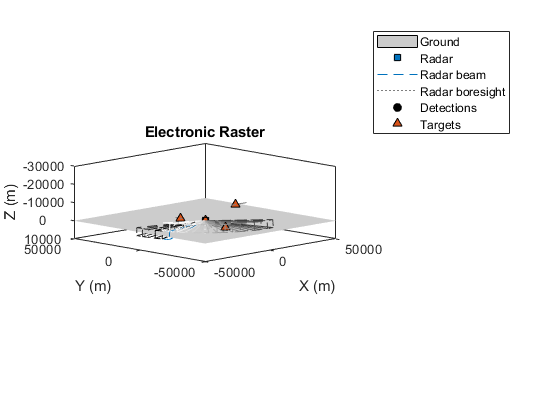
在跟踪系统中,传感器用于从环境中的目标生成测量或检测。
通过雷达传感器模拟目标检测。
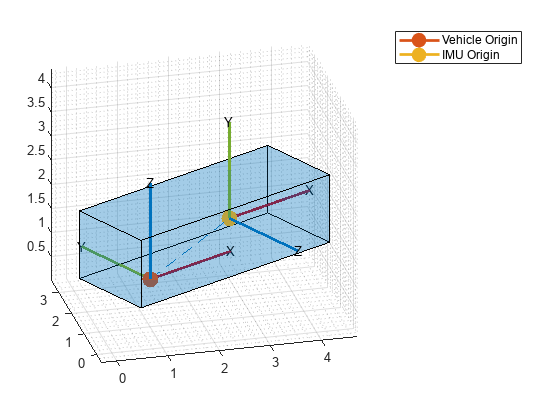
惯性传感器和GPS的模型组合。
此示例显示如何使用该示例模拟惯性测量单元(IMU)测量imusvesor.系统对象。
此示例显示如何使用IMU使用陀螺仪偏置imufilter.。
特色例子
您还可以从以下列表中选择一个网站: