insSensor
惯性导航系统和GNSS/GPS仿真模型
描述
的insSensor系统对象™为一种设备建模,该设备融合了来自惯性导航系统(INS)和全球卫星导航系统(GNSS)(如GPS)的测量数据,并输出融合的测量数据。
输出融合的INS和GNSS测量值:
创建
insSensor对象并设置其属性。调用带有参数的对象,就像调用函数一样。
要了解更多关于System对象如何工作的信息,请参见什么是系统对象?
创建
属性
使用
描述
输入参数
输出参数
对象的功能
要使用对象函数,请将System对象指定为第一个输入参数。例如,释放名为obj,使用以下语法:
发行版(obj)
例子
从固定输入生成INS测量值
创建一个运动结构,在本地东北向下(NED)原点定义一个固定位置。因为平台是固定的,所以只需要定义一个样本。假设地面真实运动以100赫兹的采样率采样10秒。创建一个默认的insSensor系统对象™。对象的输出预分配变量insSensor对象。
Fs = 100;时间= 10;numSamples = f *时间;运动=结构(…“位置”, 0(1、3)…“速度”, 0(1、3)…“定位”, (1, 1,“四元数”));INS = insSensor;positionMeasurements = 0 (numSamples, 3);velocityMeasurements = 0 (numSamples, 3);orientationMeasurements = 0 (numSamples 1“四元数”);
在循环中,调用INS使用静止运动结构返回本地NED坐标系中的位置、速度和方向测量值。记录位置,速度和方向测量。
为i = 1:numSamples measurements = INS(运动);: positionMeasurements(我)= measurements.Position;: velocityMeasurements(我)= measurements.Velocity;orientationMeasurements (i) = measurements.Orientation;结束
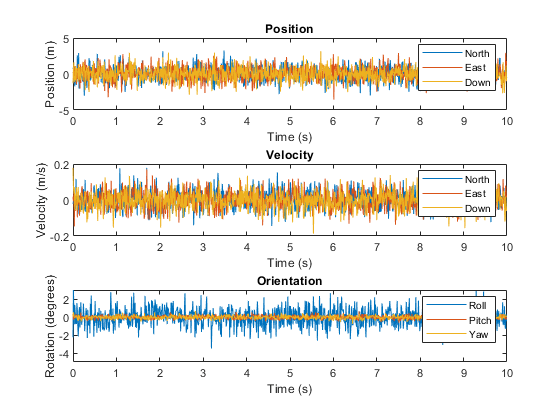
将方向从四元数转换为欧拉角以实现可视化目的。绘制随时间变化的位置、速度和方向测量值。
orientationMeasurements = eulerd (orientationMeasurements,“ZYX股票”,“帧”);t = (0: (numSamples-1)) / Fs;次要情节(1,1)情节(t, positionMeasurements)标题(“位置”)包含(“时间(s)”) ylabel (“位置(m)”)传说(“北”,“东”,“下来”) subplot(3,1,2) plot(t,velocityMeasurements)“速度”)包含(“时间(s)”) ylabel (“速度(米/秒)”)传说(“北”,“东”,“下来”子图(3,1,3)图(t,orientation, measurement)“定位”)包含(“时间(s)”) ylabel (的旋转(度))传说(“滚”,“节”,“偏航”)
为跟踪场景生成INS测量
方法生成INS度量值insSensor系统对象™。使用waypointTrajectory生成地面真相路径。使用trackingScenario组织模拟和可视化运动。
将地面真实轨迹指定为东北方向平面上的八字轨迹。使用50hz采样速率和5秒持续时间。
Fs = 50;时间= 5;numSamples = f *时间;t = (0: (numSamples-1)。/ Fs;= 2;X = a.*√(2).*cos(t) ./ (sin(t). X = a.*√(2).*cos(t) ./ (sin(t). X = a。^ 2 + 1);Y = sin(t) .* x;z = 0 (numSamples, 1);路点= [x, y, z];路径= waypointTrajectory (“锚点”锚点,“TimeOfArrival”t);
创建一个insSensor接收INS数据的建模系统对象。设置PositionAccuracy来0.1.
ins = insSensor (“PositionAccuracy”, 0.1);
创建一个单平台的跟踪场景,其运动定义为路径.
场景= trackingScenario (“UpdateRate”Fs);四轴飞行器=平台(场景);四轴飞行器。轨迹=路径;
创造一个戏剧情节来可视化基本真相四轴飞行器运动和四轴飞行器运动测量模型insSensor.
tp = theaterPlot (“XLimits”, 3, 3,“YLimits”, 3, 3);quadPlotter = platformPlotter (tp,…“DisplayName的”,“真实运动”,…“标记”,“年代”,…“MarkerFaceColor”,“蓝”);insPlotter = detectionPlotter (tp,…“DisplayName的”,“INS测量”,…“标记”,' d ',…“MarkerFaceColor”,“红色”);
在循环中,推进场景直到它完成。对于每个时间步,获取当前运动样本,为运动建模INS测量,然后绘制结果。
而advance(场景)motion = platformpose(场景)“四元数”);insMeas = ins(运动);plotPlatform (quadPlotter motion.Position);plotDetection (insPlotter insMeas.Position);暂停(1 / scenario.UpdateRate)结束
生成转向平台的INS测量
方法生成INS度量值insSensor系统对象™。使用waypointTrajectory生成地面真相路径。
指定从传感器体开始的地面真实方向x-轴与北对齐,末端与传感器体x-轴与东方对齐。为弧线轨迹指定路径点,并为相应的路径点指定到达时间向量。使用100赫兹的采样率。创建一个waypointTrajectory系统对象与路径点约束,并设置SamplesPerFrame所以整个轨迹是通过一个调用输出的。
eulerAngles = [0, 0, 0;…0, 0, 0;…90年,0,0;…90年,0,0);取向=四元数(eulerAngles,“eulerd”,“ZYX股票”,“帧”);r = 20;路点= [0,0,0;…100年,0,0;…100 + r, r, 0;…100 + r, 100 + r, 0);toa =[0、10、10 +(2 *π* r / 4), 20 +(2 *π* r / 4)];Fs = 100;numSamples =地板(Fs * toa(结束));路径= waypointTrajectory (“锚点”锚点,…“TimeOfArrival”toa,…“定位”取向,…“SampleRate”Fs,…“SamplesPerFrame”, numSamples);
创建一个insSensor接收INS数据的建模系统对象。设置PositionAccuracy来0.1.
ins = insSensor (“PositionAccuracy”, 0.1);
称之为路径点轨迹对象,路径,以产生地面真实运动。给INS模拟器打电话,ins,与地面真实运动生成国际惯导测量。
[motion.Position, motion.Orientation,运动。速度]=路径();insMeas = ins(运动);
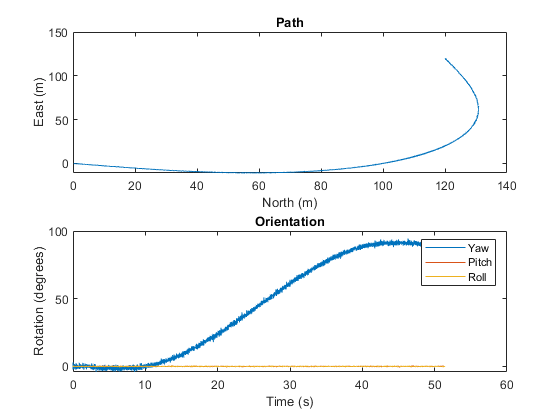
转换返回的方向ins欧拉角的角度,便于可视化。绘制完整的路径和方向。
orientationMeasurementEuler = eulerd (insMeas。取向,“ZYX股票”,“帧”);次要情节(2,1,1)情节(insMeas.Position (: 1), insMeas.Position (:, 2));标题(“路径”)包含(“北(m)”) ylabel (“东(m)”) subplot(2,1,2) t = (0:(numSamples-1)).'/Fs;情节(t, orientationMeasurementEuler (: 1),…t, orientationMeasurementEuler (:, 2),…t, orientationMeasurementEuler (:, 3));标题(“定位”)传说(“偏航”,“节”,“滚”)包含(“时间(s)”) ylabel (的旋转(度))
扩展功能
版本历史
您也可以从以下列表中选择网站: