radarEmitter
雷达信号和干扰发生器
描述
的radarEmitter系统对象™创建一个发射器来模拟雷达发射。您可以使用radarEmitter对象,用于检测和跟踪移动和静止平台。使用以下命令构建场景trackingScenario.
方法中指定的角跨度增量步进波束的机械和电子位置,从而在两次更新之间改变观察角度FieldOfView财产。雷达在机械和电子扫描限定的方位角和高程范围内扫描整个区域,MechanicalScanLimits而且ElectronicScanLimits,分别。如果方位角或仰角的扫描限制设置为[0 0],则不对该扫描模式沿该维度执行扫描。如果方位角或仰角的最大机械扫描速率设置为零,则沿该维度不执行机械扫描。
产生雷达探测:
创建
radarEmitter对象并设置其属性。使用参数调用对象,就像调用函数一样。
有关系统对象如何工作的详细信息,请参见什么是系统对象?
创建
语法
描述
发射器= radarEmitter (EmitterIndex)
发射器= radarEmitter (EmitterIndex“没有扫描”)radarEmitter它沿着雷达天线的瞄准方向盯着。不进行机械或电子扫描。此语法设置ScanMode财产“没有扫描”.
发射器= radarEmitter (EmitterIndex、“光栅”)radarEmitter对象,用于机械地扫描光栅模式。栅格跨度在方位角上为90°,从-45°到+45°,在仰角上从地平线到地平线以上10°。看到方便的语法此语法设置的属性。
发射器= radarEmitter (EmitterIndex“旋转”)radarEmitter通过以恒定速率机械旋转天线,在方位角上机械扫描360°的物体。当你设置HasElevation来真正的时,雷达天线机械地指向仰角视场中心。看到方便的语法此语法设置的属性。
发射器= radarEmitter (___,名称,值)radarEmitter (CenterFrequency, 2 e6)创建一个雷达发射器在发射器笛卡尔坐标系中创建探测,并具有200米的最大探测范围。属性指定发射器索引EmitterIndex属性时,可以省略EmitterIndex输入。
属性
使用
描述
输入参数
输出参数
对象的功能
要使用对象函数,请将System对象指定为第一个输入参数。例如,释放system对象的系统资源obj,使用这种语法:
发行版(obj)
例子
雷达干扰机模型
创建一个从干扰器前面凝视的发射器。
创建一个平台来安装干扰器。
platt = struct(...“PlatformID”, 1...“位置”, [0 0 0]);
创建一个发射器,从干扰平台的前面凝视。
干扰器= radarEmitter(1,“没有扫描”);
发射干扰波形。
时间= 0;Sig =干扰机(platt, time)
sig = radarEmission with properties: PlatformID: 1 EmitterIndex: 1 OriginPosition: [0 000] OriginVelocity: [0 000] Orientation: [1x1四元数]FieldOfView: [1 5] CenterFrequency: 300000000 Bandwidth: 3000000 WaveformType: 0 ProcessingGain: 0 PropagationRange: 0 PropagationRangeRate: 0 EIRP: 100 RCS: 0
空中交通管制塔雷达发射器模型
为空中交通管制塔建立雷达发射器模型。
模拟塔的一次完整旋转。
转速= 12.5;扫描速率= rpm*360/60;Fov = [1.4;5];update = scanrate/fov(1);
创建一个trackingScenario对象来管理平台的运动。
scene = trackingScenario(“UpdateRate”updaterate,...“StopTime”, 60 / rpm);
在场景中添加一个平台,用于承载空中交通管制塔。
塔=平台(场景);
创建一个发射器,提供360度监视。
radarTx = radarEmitter(1,“旋转”,...“UpdateRate”updaterate,...“MountingLocation”,[0 0 -15],...“MaxMechanicalScanRate”scanrate,...“FieldOfView”, fov);
把发射器接到发射塔上。
塔。发射器= radarTx
塔=平台与属性:PlatformID: 1 ClassID: 0位置:[0 0 0]方向:[0 0 0]尺寸:[1x1 struct] Mesh: [1x1 extendedObjectMesh]弹道:[1x1 kinematicTrajectory] PoseEstimator: [1x1 insSensor]发射器:{[1x1 radarEmitter]}传感器:{}签名:{[1x1 rcsSignature] [1x1 irSignature] [1x1 tsSignature]}
旋转天线,发射雷达波形。
loggedData = struct(“时间”0 (0,1)...“定位”四元数。0 (0,1));而advance(scene) time = scene. simulationtime;txSig = emit(塔,时间);loggedData。时间= [loggedData.Time;时间);loggedData。Orientation = [loggedData.Orientation;...txSig {1} .Orientation];结束
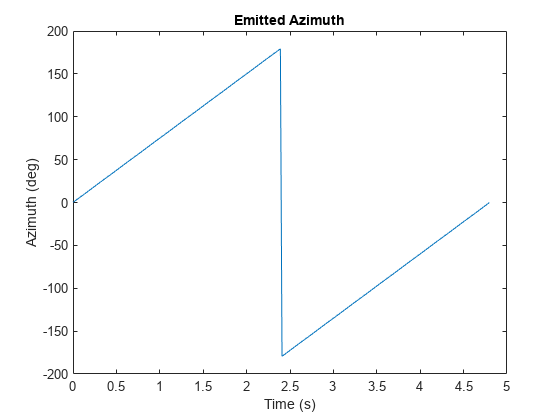
绘制发射器方位角方向。
angles = eulerd(loggedData.)取向,“zyx股票”,“帧”);情节(loggedData。时间,角度(:,1))“发射方位角”)包含(“时间(s)”) ylabel (的方位(度))
更多关于
扩展功能
您也可以从以下列表中选择一个网站: