IMUgydF4y2Ba
IMU仿真模型gydF4y2Ba
- 库:gydF4y2Ba
传感器融合与跟踪工具箱/多传感器定位/传感器模型gydF4y2Ba
导航工具箱/多传感器定位/传感器模型gydF4y2Ba
描述gydF4y2Ba
的gydF4y2BaIMUgydF4y2Ba万博1manbetx®gydF4y2Ba块模型从由加速度计、陀螺仪和磁强计传感器组成的惯性测量单元(IMU)接收数据。gydF4y2Ba
港口gydF4y2Ba
输入gydF4y2Ba
输出gydF4y2Ba
参数gydF4y2Ba
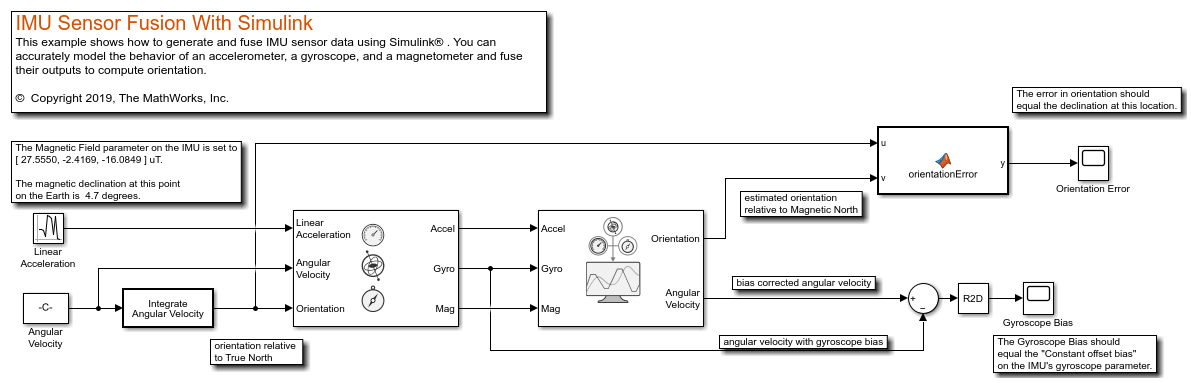
模型的例子gydF4y2Ba
算法gydF4y2Ba
加速度计gydF4y2Ba
下面的算法描述假设一个NED导航帧。加速度计模型使用地面真实方向和加速度输入gydF4y2BaimuSensorgydF4y2Ba而且gydF4y2BaaccelparamsgydF4y2Ba属性对加速度计读数建模。gydF4y2Ba
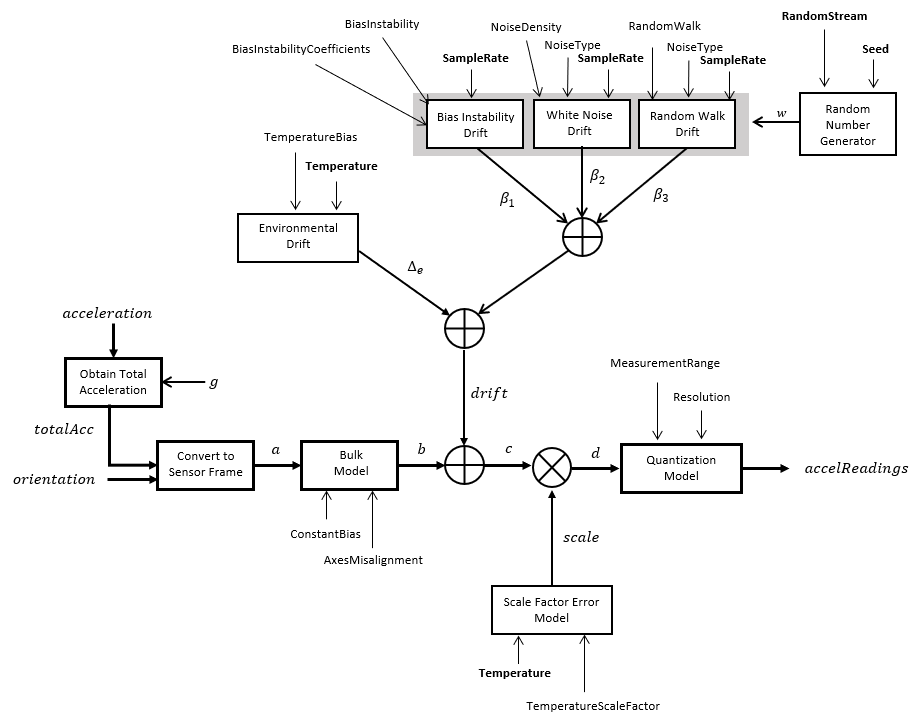
要得到总加速度(gydF4y2BatotalAccgydF4y2Ba),加速度通过重力常数矢量(gydF4y2BaggydF4y2Ba= [0;0;9.8米/秒gydF4y2Ba2gydF4y2Ba假设框架为NED)为:gydF4y2Ba
的gydF4y2Ba加速度gydF4y2Ba项为负数,当加速度计处于自由落体时,总加速度读数为零。的gydF4y2Ba加速度gydF4y2Ba项也称为比力。gydF4y2Ba
然后使用以下方法将总加速度从本地导航帧转换为传感器帧:gydF4y2Ba
如果方向以四元数形式输入,则在处理前将其转换为旋转矩阵。gydF4y2Ba
传感器帧中的真实加速度,gydF4y2Ba一个gydF4y2Ba,经过批量模型,增加了轴不对中和偏差:gydF4y2Ba
在哪里gydF4y2BaConstantBiasgydF4y2Ba的属性。gydF4y2BaaccelparamsgydF4y2Ba,gydF4y2BaαgydF4y2Ba1gydF4y2Ba,gydF4y2BaαgydF4y2Ba2gydF4y2Ba,gydF4y2BaαgydF4y2Ba3.gydF4y2Ba是由?的第一,第二和第三个元素给出的gydF4y2BaAxesMisalignmentgydF4y2Ba的属性gydF4y2BaaccelparamsgydF4y2Ba.gydF4y2Ba
偏差不稳定性漂移被建模为有偏的白噪声,然后滤波:gydF4y2Ba
在哪里gydF4y2BaBiasInstabilitygydF4y2Ba的属性。gydF4y2BaaccelparamsgydF4y2Ba,gydF4y2BahgydF4y2Ba1gydF4y2Ba属性定义的筛选器吗gydF4y2BaSampleRategydF4y2Ba属性:gydF4y2Ba
白噪声漂移是通过将白噪声随机流的元素乘以标准差来建模的:gydF4y2Ba
在哪里gydF4y2BaSampleRategydF4y2Ba是一个gydF4y2BaimuSensorgydF4y2Ba财产,gydF4y2BaNoiseDensitygydF4y2Ba是一个gydF4y2BaaccelparamsgydF4y2Ba财产。的元素gydF4y2BawgydF4y2Ba的设置是否给出随机数gydF4y2BaimuSensorgydF4y2Ba随机流。gydF4y2Ba
随机游走漂移是通过对白噪声随机流的偏置元素进行建模,然后滤波:gydF4y2Ba
在哪里gydF4y2Ba随机散步gydF4y2Ba的属性。gydF4y2BaaccelparamsgydF4y2Ba,gydF4y2BaSampleRategydF4y2Ba的属性。gydF4y2BaimuSensorgydF4y2Ba,gydF4y2BahgydF4y2Ba2gydF4y2Ba是一个过滤器,定义为:gydF4y2Ba
环境漂移噪声的模型是将与标准的温度差与温度偏差相乘:gydF4y2Ba
在哪里gydF4y2Ba温度gydF4y2Ba的属性。gydF4y2BaimuSensorgydF4y2Ba,gydF4y2BaTemperatureBiasgydF4y2Ba的属性。gydF4y2BaaccelparamsgydF4y2Ba.常数25对应于标准温度。gydF4y2Ba
温度标度因子误差建模为:gydF4y2Ba
在哪里gydF4y2Ba温度gydF4y2Ba的属性。gydF4y2BaimuSensorgydF4y2Ba,gydF4y2BaTemperatureScaleFactorgydF4y2Ba的属性。gydF4y2BaaccelparamsgydF4y2Ba.常数25对应于标准温度。gydF4y2Ba
量化是通过首先饱和连续信号模型建模的:gydF4y2Ba
然后设置分辨率:gydF4y2Ba
在哪里gydF4y2BaMeasurementRangegydF4y2Ba的属性。gydF4y2BaaccelparamsgydF4y2Ba.gydF4y2Ba
陀螺仪gydF4y2Ba
下面的算法描述假设一个NED导航帧。陀螺仪模型使用地面真实方向、加速度和角速度输入,而gydF4y2BaimuSensorgydF4y2Ba而且gydF4y2BagyroparamsgydF4y2Ba属性对加速度计读数建模。gydF4y2Ba
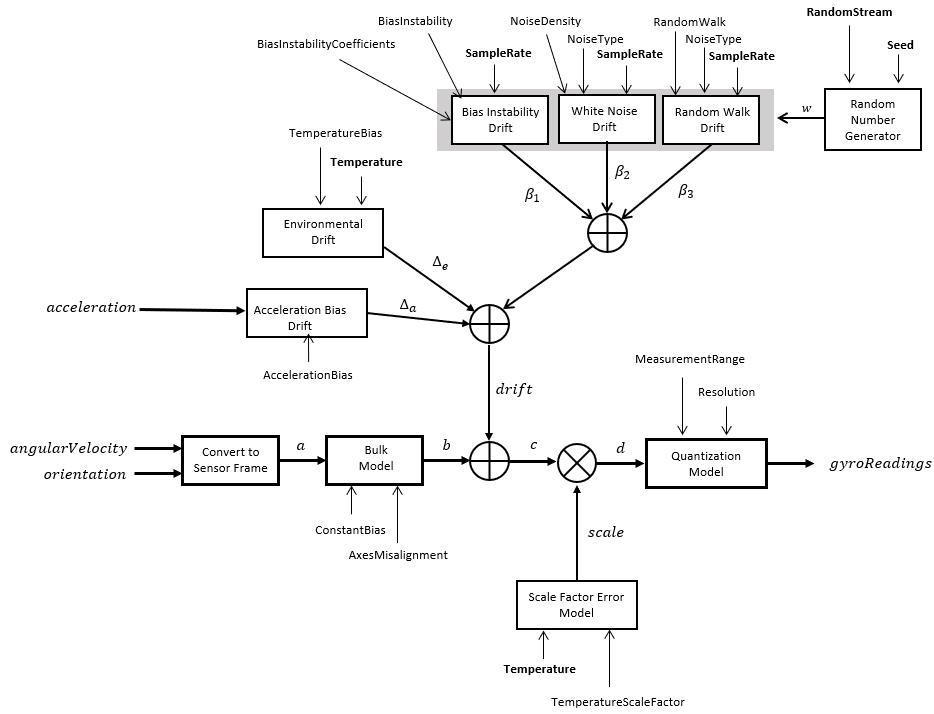
地面真实角速度使用地面真实方向从局部帧转换为传感器帧:gydF4y2Ba
如果方向以四元数形式输入,则在处理前将其转换为旋转矩阵。gydF4y2Ba
传感器帧中的真实角速度,gydF4y2Ba一个gydF4y2Ba,经过批量模型,增加了轴不对中和偏差:gydF4y2Ba
在哪里gydF4y2BaConstantBiasgydF4y2Ba的属性。gydF4y2BagyroparamsgydF4y2Ba,gydF4y2BaαgydF4y2Ba1gydF4y2Ba,gydF4y2BaαgydF4y2Ba2gydF4y2Ba,gydF4y2BaαgydF4y2Ba3.gydF4y2Ba是由?的第一,第二和第三个元素给出的gydF4y2BaAxesMisalignmentgydF4y2Ba的属性gydF4y2BagyroparamsgydF4y2Ba.gydF4y2Ba
偏差不稳定性漂移被建模为有偏的白噪声,然后滤波:gydF4y2Ba
在哪里gydF4y2BaBiasInstabilitygydF4y2Ba的属性。gydF4y2BagyroparamsgydF4y2Ba而且gydF4y2BahgydF4y2Ba1gydF4y2Ba属性定义的筛选器吗gydF4y2BaSampleRategydF4y2Ba属性:gydF4y2Ba
白噪声漂移是通过将白噪声随机流的元素乘以标准差来建模的:gydF4y2Ba
在哪里gydF4y2BaSampleRategydF4y2Ba是一个gydF4y2BaimuSensorgydF4y2Ba财产,gydF4y2BaNoiseDensitygydF4y2Ba是一个gydF4y2BagyroparamsgydF4y2Ba财产。的要素gydF4y2BawgydF4y2Ba的设置是否给出随机数gydF4y2BaimuSensorgydF4y2Ba随机流。gydF4y2Ba
随机游走漂移是通过对白噪声随机流的偏置元素进行建模,然后滤波:gydF4y2Ba
在哪里gydF4y2Ba随机散步gydF4y2Ba的属性。gydF4y2BagyroparamsgydF4y2Ba,gydF4y2BaSampleRategydF4y2Ba的属性。gydF4y2BaimuSensorgydF4y2Ba,gydF4y2BahgydF4y2Ba2gydF4y2Ba是一个过滤器,定义为:gydF4y2Ba
环境漂移噪声的模型是将与标准的温度差与温度偏差相乘:gydF4y2Ba
在哪里gydF4y2Ba温度gydF4y2Ba的属性。gydF4y2BaimuSensorgydF4y2Ba,gydF4y2BaTemperatureBiasgydF4y2Ba的属性。gydF4y2BagyroparamsgydF4y2Ba.常数25对应于标准温度。gydF4y2Ba
温度标度因子误差建模为:gydF4y2Ba
在哪里gydF4y2Ba温度gydF4y2Ba的属性。gydF4y2BaimuSensorgydF4y2Ba,gydF4y2BaTemperatureScaleFactorgydF4y2Ba的属性。gydF4y2BagyroparamsgydF4y2Ba.常数25对应于标准温度。gydF4y2Ba
量化是通过首先饱和连续信号模型建模的:gydF4y2Ba
然后设置分辨率:gydF4y2Ba
在哪里gydF4y2BaMeasurementRangegydF4y2Ba的属性。gydF4y2BagyroparamsgydF4y2Ba.gydF4y2Ba
磁强计gydF4y2Ba
下面的算法描述假设一个NED导航帧。磁力计模型使用地面真实方向和加速度输入gydF4y2BaimuSensorgydF4y2Ba而且gydF4y2BamagparamsgydF4y2Ba属性来模拟磁力计读数。gydF4y2Ba
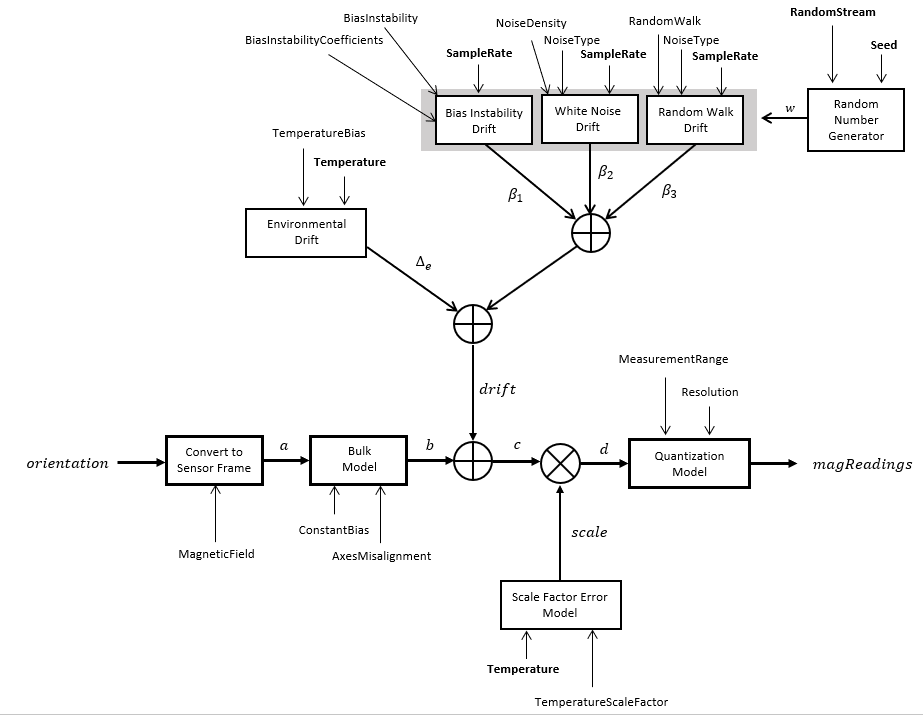
地面真实加速度使用地面真实方向从局部帧转换到传感器帧:gydF4y2Ba
如果方向以四元数形式输入,则在处理前将其转换为旋转矩阵。gydF4y2Ba
传感器帧中的真实加速度,gydF4y2Ba一个gydF4y2Ba,经过批量模型,增加了轴不对中和偏差:gydF4y2Ba
在哪里gydF4y2BaConstantBiasgydF4y2Ba的属性。gydF4y2BamagparamsgydF4y2Ba,gydF4y2BaαgydF4y2Ba1gydF4y2Ba,gydF4y2BaαgydF4y2Ba2gydF4y2Ba,gydF4y2BaαgydF4y2Ba3.gydF4y2Ba是由?的第一,第二和第三个元素给出的gydF4y2BaAxesMisalignmentgydF4y2Ba的属性gydF4y2BamagparamsgydF4y2Ba.gydF4y2Ba
偏差不稳定性漂移被建模为有偏的白噪声,然后滤波:gydF4y2Ba
在哪里gydF4y2BaBiasInstabilitygydF4y2Ba的属性。gydF4y2BamagparamsgydF4y2Ba而且gydF4y2BahgydF4y2Ba1gydF4y2Ba属性定义的筛选器吗gydF4y2BaSampleRategydF4y2Ba属性:gydF4y2Ba
白噪声漂移是通过将白噪声随机流的元素乘以标准差来建模的:gydF4y2Ba
在哪里gydF4y2BaSampleRategydF4y2Ba是一个gydF4y2BaimuSensorgydF4y2Ba财产,gydF4y2BaNoiseDensitygydF4y2Ba是一个gydF4y2BamagparamsgydF4y2Ba财产。的要素gydF4y2BawgydF4y2Ba的设置是否给出随机数gydF4y2BaimuSensorgydF4y2Ba随机流。gydF4y2Ba
随机游走漂移是通过对白噪声随机流的偏置元素进行建模,然后滤波:gydF4y2Ba
在哪里gydF4y2Ba随机散步gydF4y2Ba的属性。gydF4y2BamagparamsgydF4y2Ba,gydF4y2BaSampleRategydF4y2Ba的属性。gydF4y2BaimuSensorgydF4y2Ba,gydF4y2BahgydF4y2Ba2gydF4y2Ba是一个过滤器,定义为:gydF4y2Ba
环境漂移噪声的模型是将与标准的温度差与温度偏差相乘:gydF4y2Ba
在哪里gydF4y2Ba温度gydF4y2Ba的属性。gydF4y2BaimuSensorgydF4y2Ba,gydF4y2BaTemperatureBiasgydF4y2Ba的属性。gydF4y2BamagparamsgydF4y2Ba.常数25对应于标准温度。gydF4y2Ba
温度标度因子误差建模为:gydF4y2Ba
在哪里gydF4y2Ba温度gydF4y2Ba的属性。gydF4y2BaimuSensorgydF4y2Ba,gydF4y2BaTemperatureScaleFactorgydF4y2Ba的属性。gydF4y2BamagparamsgydF4y2Ba.常数25对应于标准温度。gydF4y2Ba
量化是通过首先饱和连续信号模型建模的:gydF4y2Ba
然后设置分辨率:gydF4y2Ba
在哪里gydF4y2BaMeasurementRangegydF4y2Ba的属性。gydF4y2BamagparamsgydF4y2Ba.gydF4y2Ba
扩展功能gydF4y2Ba
版本历史gydF4y2Ba
另请参阅gydF4y2Ba
类gydF4y2Ba
accelparamsgydF4y2Ba|gydF4y2BagyroparamsgydF4y2Ba|gydF4y2BamagparamsgydF4y2Ba
对象gydF4y2Ba
imuSensorgydF4y2Ba|gydF4y2BagpsSensorgydF4y2Ba|gydF4y2BainsSensorgydF4y2Ba
主题gydF4y2Ba
您也可以从以下列表中选择一个网站:gydF4y2Ba
美洲gydF4y2Ba
- 美国拉丁gydF4y2Ba(西班牙语)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德语)gydF4y2Ba
- 西班牙gydF4y2Ba(西班牙语)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德语)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 联合王国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本gydF4y2Ba(日本語)gydF4y2Ba
- 한국gydF4y2Ba(한국어)gydF4y2Ba