bfscore.
图像分割的轮廓匹配分数
Description
分数= bfscore(prediction那groundTruth的)predictionand the true segmentation ingroundTruth。predictionandgroundTruth可以是二进制分段的一对逻辑阵列,或者是多种多组分段的一对标签或分类阵列。
[also returns the precision and recall values for the分数那precision那recall] = bfscore(prediction那groundTruth的)prediction图像相比之下groundTruthimage.
[___] = bfscore(使用指定的阈值计算BF分数作为距离误差容差,以确定边界点是否具有匹配。prediction那groundTruth那threshold的)
例子
计算二进制分段的BF分数
读取具有对象到段的图像。将图像转换为灰度,并显示结果。
a = imread('hands1.jpg');I = rgb2gray(A); figure imshow(I) title('原始图像'的)
使用活动轮廓(Snakes)方法进行手动。
mask = false(size(I)); mask(25:end-25,25:end-25) = true; BW = activecontour(I, mask, 300);
Read the ground truth segmentation.
BW_groundTruth = imread('hands1-mask.png');
计算主动轮廓分割的BF分数对抗地面真理。
相似之处=bfscore.(BW, BW_groundTruth);
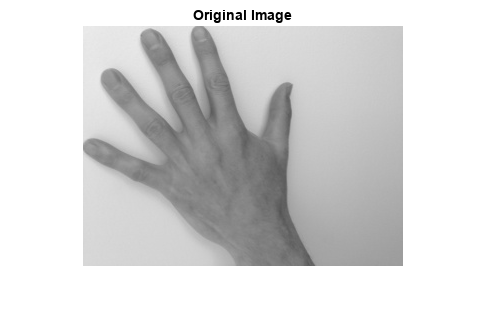
在彼此顶部显示面罩。颜色表示掩模的差异。
图imshowpair(bw,bw_groundtruth)标题(['bf得分='num2str(similarity)])
计算多区域分割的BF分数
This example shows how to segment an image into multiple regions. The example then computes the BF score for each region.
读取具有若干区域的图像到段。
RGB = imread('yellowlily.jpg');
Create scribbles for three regions that distinguish their typical color characteristics. The first region classifies the yellow flower. The second region classifies the green stem and leaves. The last region classifies the brown dirt in two separate patches of the image. Regions are specified by a 4-element vector, whose elements indicate the x- and y-coordinate of the upper left corner of the ROI, the width of the ROI, and the height of the ROI.
region1 = [350 700 425 120];%[x y w h]格式BW1 = false(size(RGB,1),size(RGB,2)); BW1(region1(2):region1(2)+region1(4),region1(1):region1(1)+region1(3)) = true; region2 = [800 1124 120 230]; BW2 = false(size(RGB,1),size(RGB,2)); BW2(region2(2):region2(2)+region2(4),region2(1):region2(1)+region2(3)) = true; region3 = [20 1320 480 200; 1010 290 180 240]; BW3 = false(size(RGB,1),size(RGB,2)); BW3(region3(1,2):region3(1,2)+region3(1,4),region3(1,1):region3(1,1)+region3(1,3)) = true; BW3(region3(2,2):region3(2,2)+region3(2,4),region3(2,1):region3(2,1)+region3(2,3)) = true;
在图像顶部显示种子区域。
figure imshow(RGB) holdonvisboundaries(bw1,'Color'那'r');visboundaries(bw2,'Color'那'G');visboundaries(bw3,'Color'那'B');title('Seed regions'的)

Segment the image into three regions using geodesic distance-based color segmentation.
l = Imseggeodesic(RGB,BW1,BW2,BW3,'AdaptiveChannelweighting',真的);
加载图像的地面真相分割。
L_groundTruth = double(imread('YellowLily-segmented.png'));
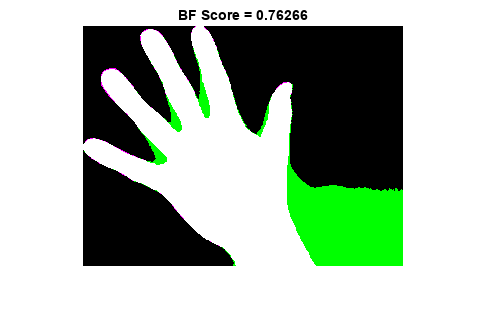
用地面真理在视觉上比较分割结果。
图imshowpair(label2rgb(l),label2rgb(l_groundtruth),'剪辑'的)title('分割结果(左)和地面真理(右)的比较的)
计算每个分段区域的BF分数。
相似之处= bfscore(l,l_groundtruth)
相似之处=3.×10.7992 0.5333 0.7466
BF分数对于第二区域明显较小。该结果与分段结果的视觉比较一致,这错误地将图像的右下角的污垢分类为叶子。
输入参数
输出参数
更多关于
References
[1] Csurka,G.,D. Larlus和F. perronnin。“语义细分的良好评估措施是什么?”英国机器愿景会议的诉讼程序那2013, pp. 32.1-32.11.
介绍在R2017B.
You can also select a web site from the following list:
Americas
- América Latina(Español)
- 加拿大(英语)
- United States(英语)