para2fan
将平行光束投影转换为扇形光束
语法
描述
[返回扇形波束传感器位置F,fan_sensor_positions,fan_rotation_angles) = fan2para (___)fan_sensor_positions和旋转角度fan_rotation_angles.
例子
将平行光束投影转换为扇形光束投影
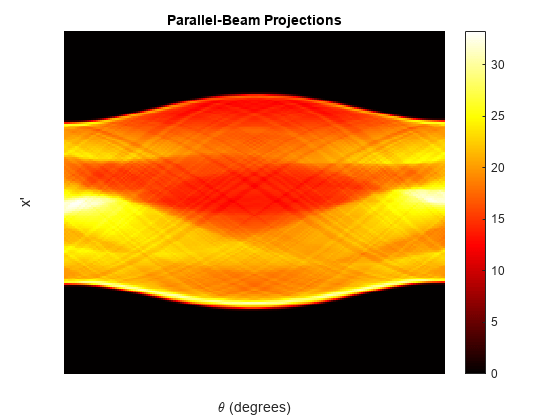
生成平行光束的预测
ph =幻影(128);θ= 0:180;[P, xp] =氡(ph值θ);imshow (P []“XData”θ,“YData”xp,“InitialMagnification”,“健康”)轴正常的标题(“平行光束预测”)包含(‘\θ(度)) ylabel (“x””甘氨胆酸)colormap(热),colorbar
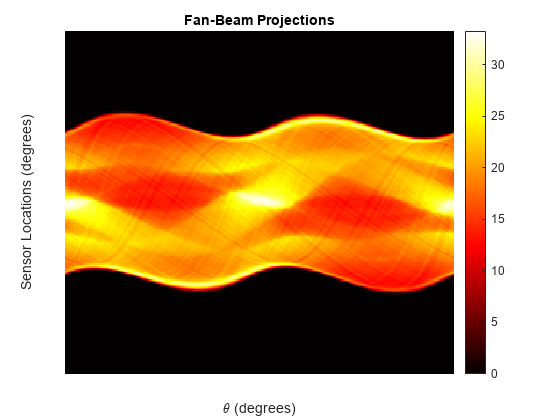
转换为扇光束投影
[新款式号,fpo] = para2fan (P, 100);图imshow (F []“XData”新款式,“YData”fpo,“InitialMagnification”,“健康”)轴正常的标题(“扇形波束预测”)包含(‘\θ(度)) ylabel (的传感器位置(度)甘氨胆酸)colormap(热),colorbar
输入参数
P- - - - - -平行光束投影数据
数字矩阵
平行光束投影数据,指定为数值矩阵。每一列的P包含一个旋转角度的平行光束数据。列数表示平行光束旋转角度的个数,行数表示平行光束传感器的个数。
数据类型:双|单
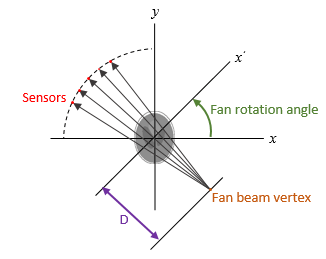
D- - - - - -从扇光束顶点到旋转中心的距离
正数
从扇光束顶点到旋转中心的像素距离,指定为正数。para2fan假设旋转中心为投影的中心点,定义为装天花板(大小(F, 1) / 2).的价值D一定大于等于ParallelSensorSpacing*(大小(P, 1) 1) / 2
这个数字说明了D对于一个扇波束投影,与扇波束顶点有关。
数据类型:双|单
名称-值参数
指定可选的用逗号分隔的对名称,值参数。的名字参数是name和价值为对应值。的名字必须出现在引号内。可以以任意顺序指定多个名称和值对参数Name1, Value1,…,的家.
F = para2fan (P D ' FanRotationIncrement ', 5)
FanRotationIncrement- - - - - -扇波束旋转角度增量
积极的标量
扇形光束旋转角度的角度增量,以逗号分隔对组成“FanRotationIncrement”一个正的标量。
如果
FanCoverage是“循环”,然后360 /FanRotationIncrement必须是整数。如果您没有指定
FanRotationIncrement,则默认值等于平行光束旋转角度。

数据类型:双
扇波束传感器定位,指定为逗号分隔对组成“FanSensorGeometry”和下列值之一。
价值 |
意义 |
图 |
|---|---|---|
|
传感器沿一定距离的圆弧以相等的角度间隔分布
|
 |
|
传感器沿与传感器平行的直线以等距离间隔布置x '轴。最接近的传感器是距离
|
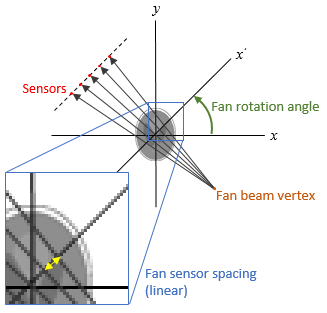 |
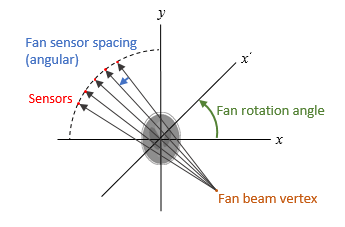
FanSensorSpacing- - - - - -扇形波束传感器间距
积极的标量
扇波束传感器间距,指定为由逗号分隔的对组成“FanSensorSpacing”一个正的标量。
如果
FanSensorGeometry是“弧”,然后FanSensorSpacing以角度定义角间距。如果
FanSensorGeometry是“行”,然后FanSensorSpacing定义扇光束之间的线性距离,以像素为单位。线间距测量在x '轴。
如果您没有指定FanSensorGeometry,则为默认值FanSensorSpacing最小的值是由ParallelSensorSpacing这样:
如果
FanSensorGeometry是“弧”,然后FanSensorSpacing是180 /π*最佳翻译(ParallelSensorSpacing/D)如果
FanSensorGeometry是“行”,然后FanSensorSpacing是D*印度历的7月(ParallelSensorSpacing/D)
数据类型:双
插值- - - - - -类型的插值
“线性”(默认)|“最近的”|样条的|“pchip”
在平行光束和扇光束数据之间使用的插值类型,指定为由“插值”其中一个值。
“最近的”——加权
“线性”-线性(默认)
样条的-分段三次样条
“pchip”-分段立方Hermite (PCHIP)
ParallelCoverage- - - - - -平行光束旋转范围
“halfcycle”(默认)|的周期
平行光束旋转范围,用逗号分隔的一对组成“ParallelCoverage”其中一个值。
“循环”-并行数据涵盖[0,360)度的全范围。“halfcycle”-平行数据涵盖[0,180)度。
ParallelSensorSpacing- - - - - -平行光束传感器间距
1|积极的标量
平行光束传感器间距(以像素为单位),指定为由“ParallelSensorSpacing”一个正的标量。
数据类型:双
输出参数
您也可以从以下列表中选择一个网站:
