SegmentgroundSmrf.
利用SMRF算法从激光雷达数据分割地面
句法
描述
地下田径= segmentgroundsmrf(Ptcloud.那gridResolution)
[另外返回地点和非地点作为个人地下田径那nongroundptcloud.那地下Cloud.] = segmentgroundsmrf(___)pointCloud对象。将此语法与前面语法中的任何输入参数组合一起使用。
例子
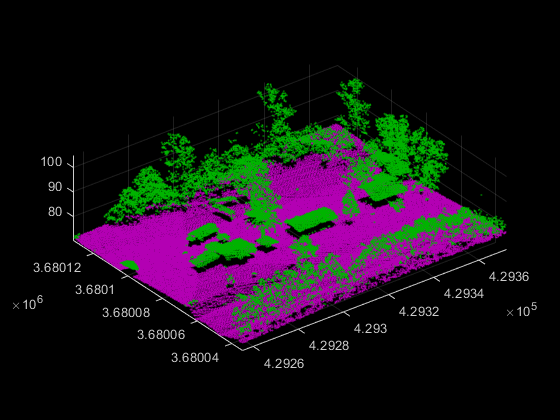
部分地面在航空激光雷达数据
将地面分割成无组织的空中点云。
创建一个拉斯菲尔德尔对象访问LAS文件数据。
filename = fullfile(toolboxdir('lidar'),'lidardata'那'las'那......“aerialLidarData2.las”);lasreader = lasfilereader(文件名);
从LAS文件中读取点云数据readPointCloud.功能。
ptcloud = ReadPointCloud(Lasreader);
从点云分割地面数据。
[groundPtsIdx, nonGroundPtCloud groundPtCloud] = segmentGroundSMRF (ptCloud);
想象地面和非地面点。
图pcshowpair (groundPtCloud nonGroundPtCloud)
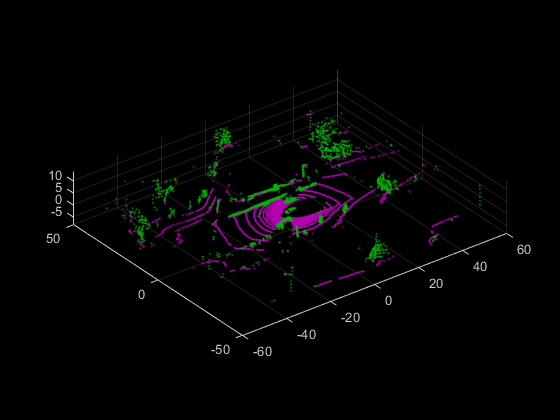
点云数据的分割地面
将地面分割成有组织的点云。点云是在高速公路场景中拍摄的。
将点云数据加载到工作区中。
ld = load(“drivingLidarPoints.mat”);
从点云分割地面数据。
[~, nonGroundPtCloud groundPtCloud] = segmentGroundSMRF (......那ld.ptCloud,“ElevationThreshold”,0.1,'expationscale',0.25);
可视化地面和非接地点。
图pcshowpair(groundPtCloud,nonGroundPtCloud) xlim([-60 60]) ylim([-50 50])
输入参数
输出参数
算法
简单的形态过滤器(SMRF)算法[1]将点云数据分割为地面点和非地面点。算法分为三个阶段:
从点云数据创建一个最小高程面。
将表面分割成地面和非地面网格单元。
对原始点云数据进行分割。
极小曲面创建
将点云数据沿xy -维度(鸟瞰图)。使用网格元素维度使用
gridResolution.找到最低的海拔(Z.闵)每个网格元素(像素)的值。
结合所有的Z.闵值到一个二维矩阵(光栅图像),以创建一个最小高程表面地图。
表面地图分段
在最小表面图上应用形态开口操作。有关形态开放的更多信息,请参阅形态运算的类型.
使用带半径为1像素的磁盘形结构元素。有关更多信息,请参阅结构化元素.
计算每个网格元件的最小表面和打开的表面图之间的斜率。如果差异大于高度阈值,则将像素分类为非接地。
迭代地执行步骤1到3。在每次迭代中将结构元素半径增加1像素,直到它达到最大半径
maxwindowradius..迭代过程的最终结果是一个二进制掩码,其中每个像素被划分为接地或非接地。
点云分割
在原始的最小表面地图上应用二元掩码来消除非地面网格。
使用图像插值技术填充未填充的网格,以创建估计的高度模型。
计算原始点云中各点与估计高程模型之间的高程差。如果差大于
海拔赫尔德,将像素分类为非接地。
参考文献
[1] Pingel,Thomas J.,Keith C. Clarke和William A. McBride。“一种改进的地形分类空气传播的LIDAR数据的简单形态过滤器。”摄影测量与遥感学报77(2013年3月):21-30。https://www.sciencedirect.com/science/article/abs/pii/S0924271613000026?via%3Dihub.
你也可以从以下列表中选择一个网站: