主要内容
segmentgroundfromlidardata.
组织LIDAR数据的分段接地点
描述
例子
段和绘图组织了激光雷达数据
有组织的激光雷亚云的分段地点和非应点。从这些分段创建有组织的点云,并显示它们。
装载有组织的激光乐队,点云。
ld = load('treatlidarpoints.mat');
组织激光雷达云的分段接地点。
地下室id = segmentgroundfromlidardata(ld.ptcloud);
通过使用仅包含这些接地点的有组织的点云选择功能。显示此点云。
地址Cloud = Select(LD.PTCloud,地面);图PCHSHOW(地下Cloud)

创建仅包含非地点的有组织的点云。指定0.5米的阈值。
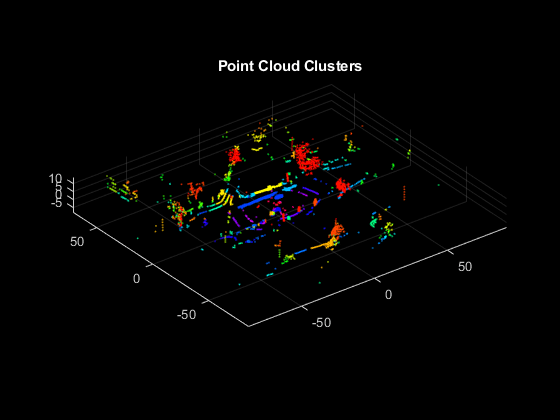
nongroundptcloud = select(ld.ptcloud,~gindptsidx,'输出'那'满的');Distthreshold = 0.5;[标签,numflusters] = SegmentLidardata(非区间Ploud,Distthreshold);
显示非应点云集群。
图Colormap(HSV(Numflusters))PCSHOW(非频道Cloud.Location,标签)标题('点云簇')
使用PCAP文件的段和绘制接地平面
将VelodynePCAP®加载到工作区。
Velodynefilereaderobj = Velodynefilereader('lidardata_constructionsroad.pcap'那'hdl32e');
使用PCPlayer创建点云播放器。定义它X- ,y-, 和Z.-axes限制,以米为单位标记轴。
xlimits = [-40 40];ylimits = [-15 15];zlimits = [-3 3];Player = PCPlayer(xlimits,ylimits,zlimits);
标记PCPlayer轴。
xlabel(player.axes,'x(m)')Ylabel(Player.Axes,'y(m)')zlabel(player.axes,'z(m)')
设置ColorMap以用于标记点。使用RGB三联网来指定地面点的绿色,为障碍点的红色。
颜色= [0 1 0;1 0 0];GreenIdx = 1;redidx = 2;
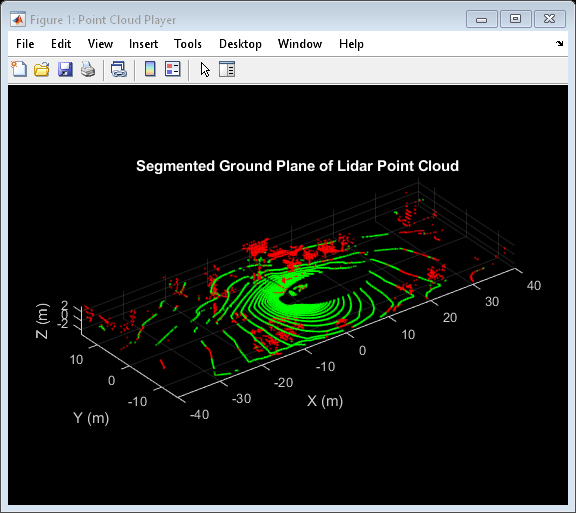
迭代在Velodyne PCAP文件中的前200点云,使用Readframe.阅读数据。分割每个点云的地点。颜色所有地点绿色和非地点红色。绘制由此产生的激光箭云。
Colormap(Player.Axes,Colors)标题(Player.Axes,'激光灯的分割平面云');为了我= 1:200%读取当前帧。ptcloud = velodynefilereaderobj.readframe(i);%创建标签数组。colorlabels = zeros(大小(ptcloud.location,1),尺寸(ptcloud.location,2));%找到了地点。地下室id = segmentgroundfromlidardata(ptcloud);%映射彩色地面点为绿色。colorlabels(地面上x(:))= greenidx;%映射彩色非地点为红色。colorlabels(〜partinptsidx(:))= redidx;%绘制结果。查看(播放器,ptcloud.location,colorlabels)结尾
输入参数
输出参数
参考
[1] Bogoslavskyi,I。“稀疏3D激光扫描的高效在线分割。”摄影测量,遥感与地理信息科学学报。卷。85,第1,2017,第41-52页。
扩展能力
在R2018B中介绍
您还可以从以下列表中选择一个网站:
